机器人的运动
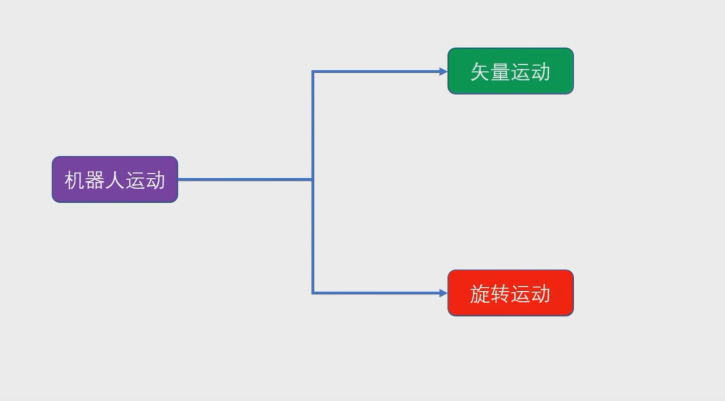
- 矢量运动
- x 前后
- y 左右
- z 上下
- 旋转运动
- x轴 滚转
- y轴 俯仰
- z轴 自转
如何确认坐标轴
坐标系确认的方法 右手定则

如何确认旋转正方向
怎么确定旋转的正方向 右手螺旋定则
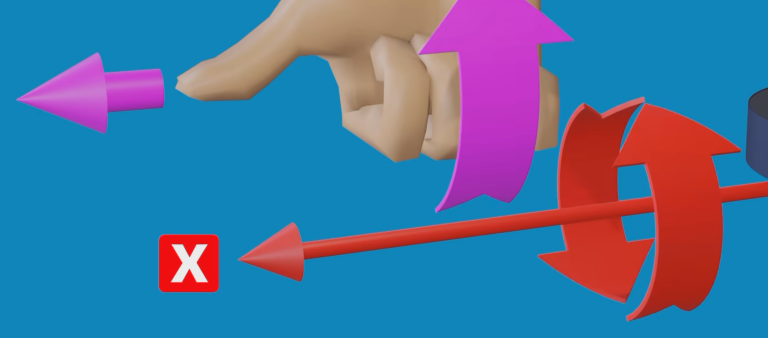
这个方向便是正方向
速度量纲
矢量运动
量纲为 m/s
旋转运动
量纲为 弧度/s
pi = 3.14, = 180°
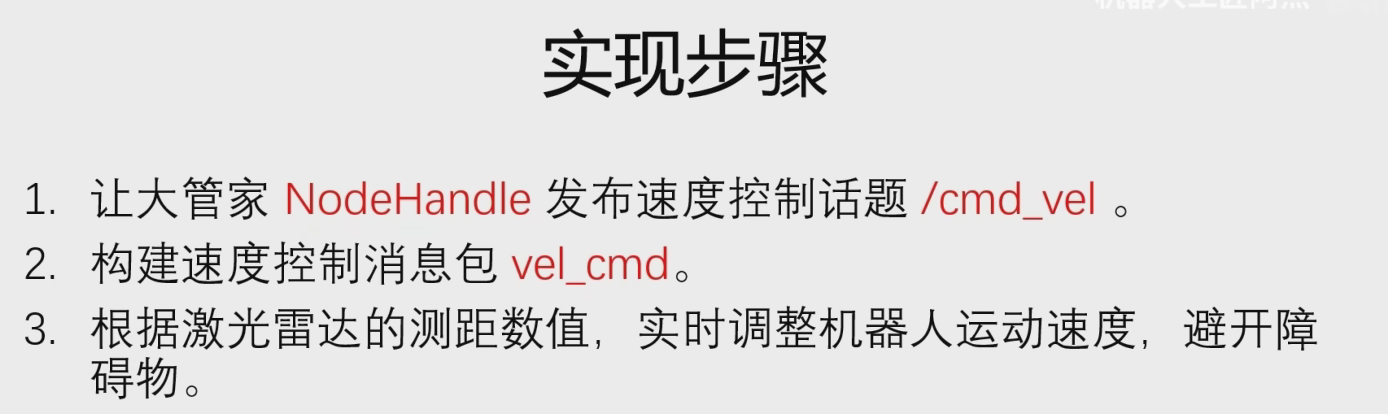
消息包便是这样的
ROS机器人运动控制
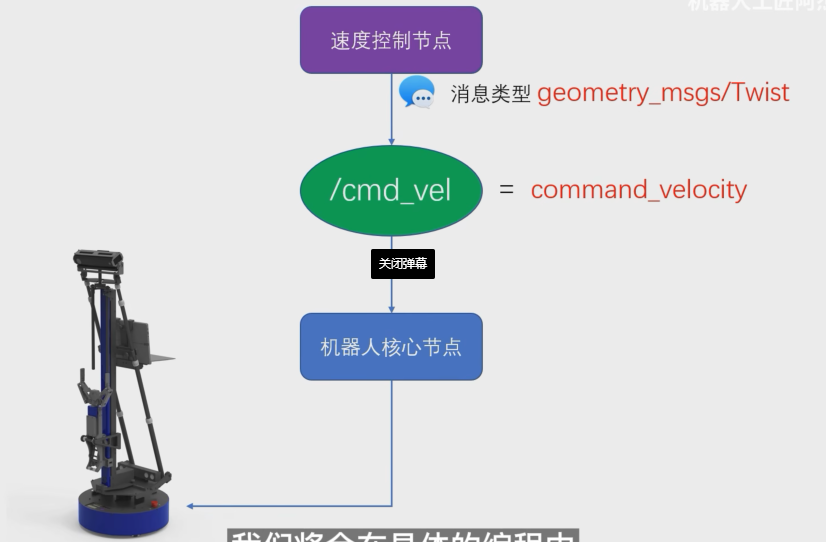
上述的节点约定俗称,
/cmd_ve l 运动状态消息节点 是约定的写法
仿真
没有使用机器人使用仿真软件来做
项目的的地址:
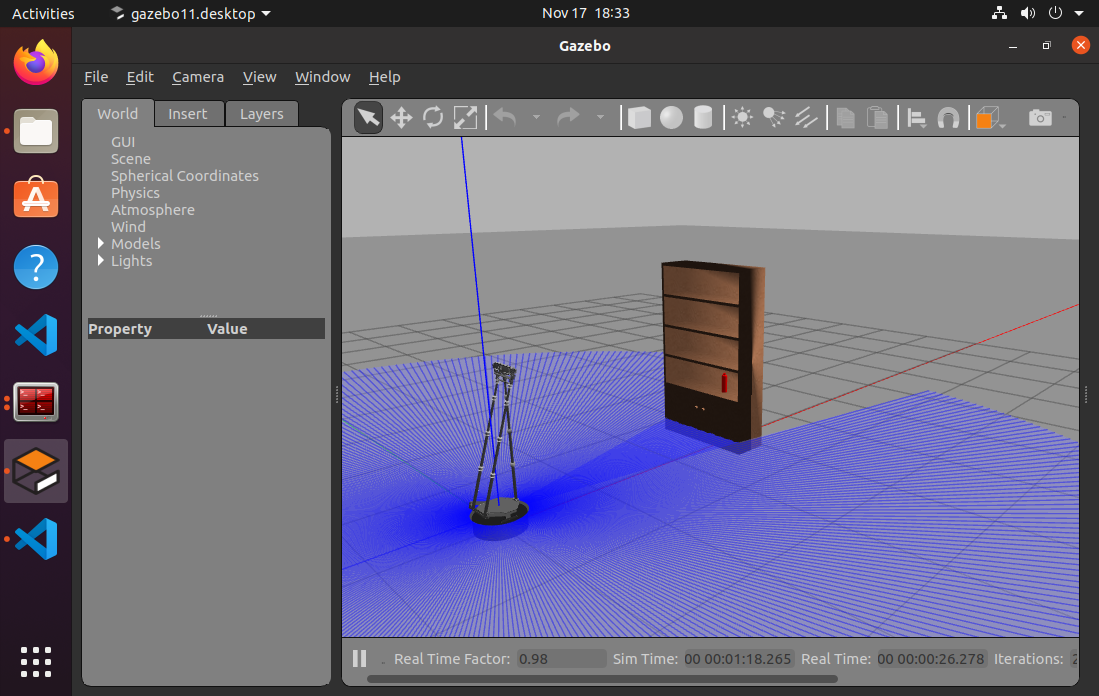
启动仿真软件
roslaunch wpr_simulation wpb_simple.launch
启动后画面呈现这样
启动运动控制实例程序
rosrun wpr_simulation demo_vel_ctrl
运行完之后,这个机器人会一直往前前进
实现思路
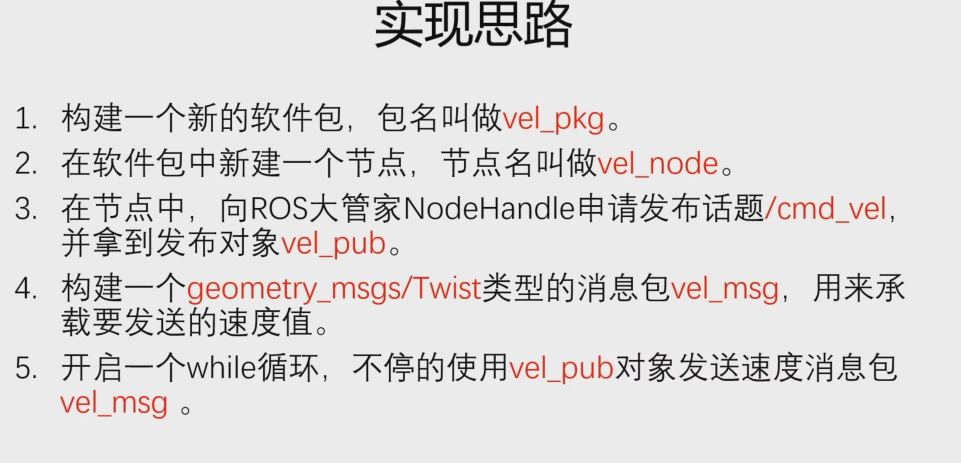
- 创建在
catkin_ws/src下创建 pkg
caktin_create_pkg vel_pkg roscpp rospy geometry_msgs
C++实现
vel_node.cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "vel_node");
ros::NodeHandle n;
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel", 10); // 修正拼写错误
geometry_msgs::Twist vel_msg; // 修正拼写错误
vel_msg.linear.x = 0.1;
vel_msg.linear.y = 0;
vel_msg.linear.z = 0;
vel_msg.angular.x = 0;
vel_msg.angular.y = 0;
vel_msg.angular.z = 10;
ros::Rate r(30);
while (ros::ok()) {
vel_pub.publish(vel_msg);
r.sleep();
}
return 0;
}
直接旋转起来了+往前前进
Python实现
#!/usr/bin/env python3
# coding=utf-8
import rospy
from geometry_msgs.msg import Twist
if __name__ == "__main__":
rospy.init_node("demo_vel_ctrl")
# 发布速度控制话题
vel_pub = rospy.Publisher("cmd_vel",Twist,queue_size=10)
# 构建速度消息包并赋值
vel_msg = Twist()
vel_msg.linear.x = 0.1
# 构建发送频率对象
rate = rospy.Rate(10)
while not rospy.is_shutdown():
vel_pub.publish(vel_msg)
rate.sleep()
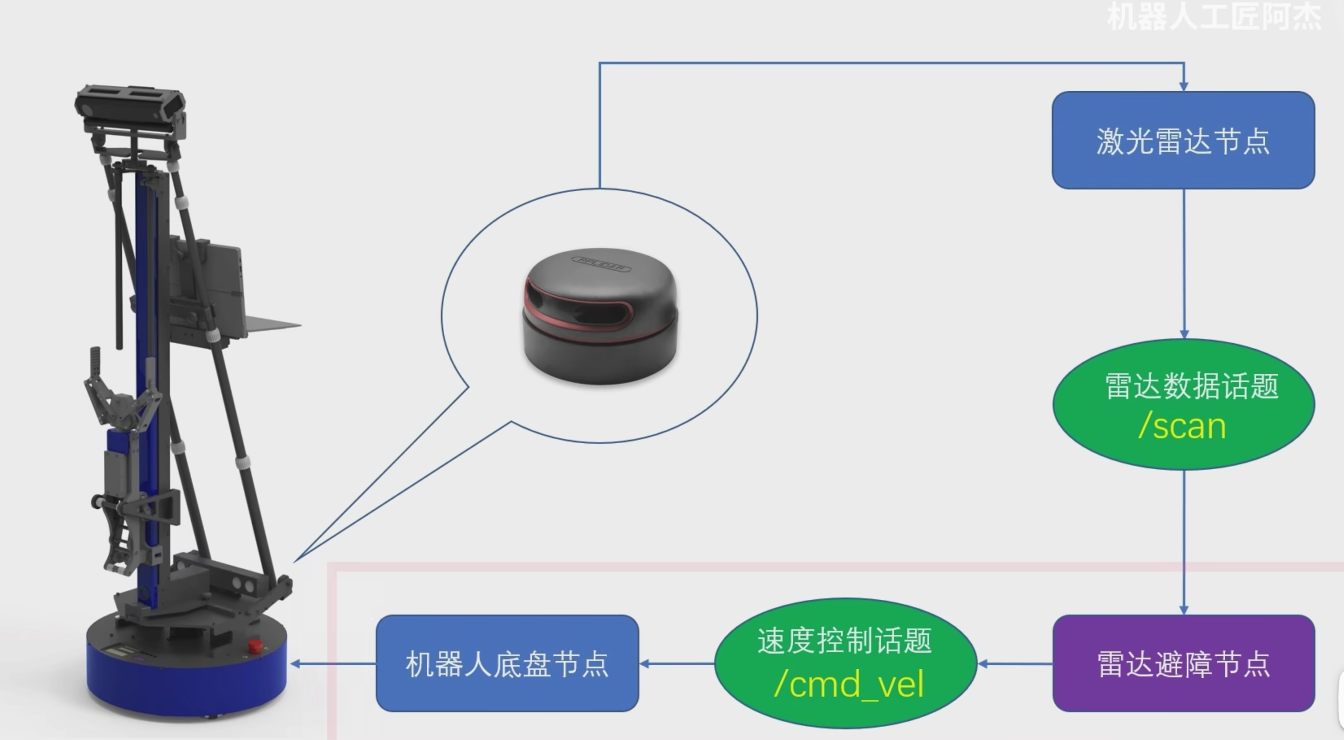
激光雷达的工作原理
雷达的种类
- TOF激光雷达
激光雷达的消息包格式
雷达主题的 topic
/scan
查看 数据包
rostopic echo /scan --noarr
- –noarr 不显示数组
- 查看的数据如下
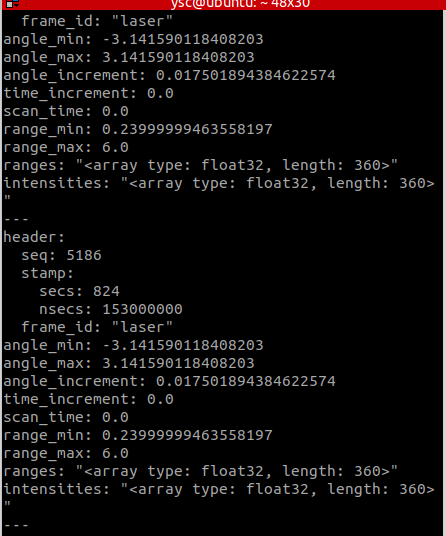
这是 雷达的消息格式
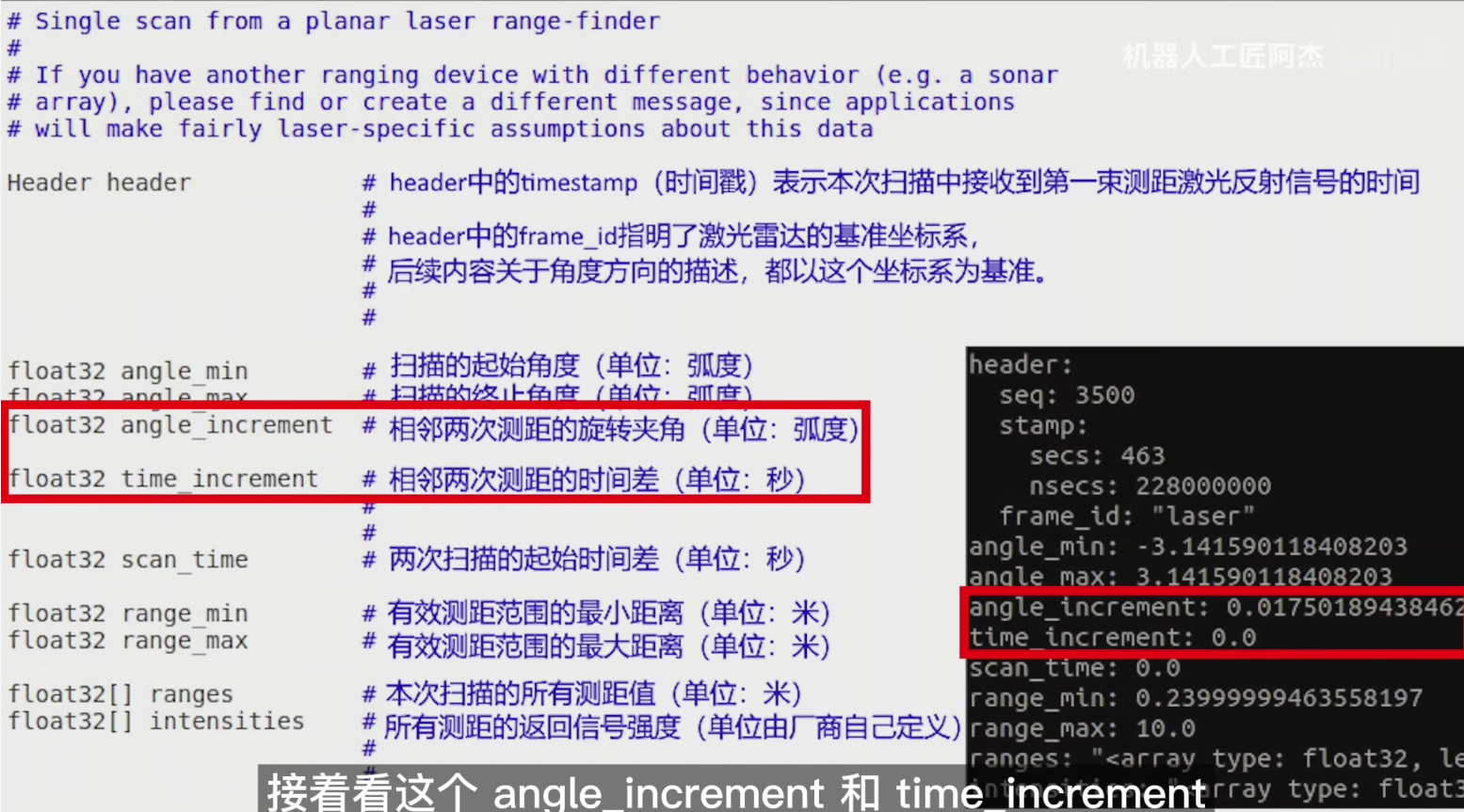
intensities
- angle_min 起始角度
- angel_max 扫描中止角度
- time_increment
- scan_time 扫描一次花费的时间[扫描频率]
- range_min 扫描的最小距离
- range_max 扫描的最大距离
- []ranges
有360个值,表示从 起始角度 到 中止角度 的 各个角度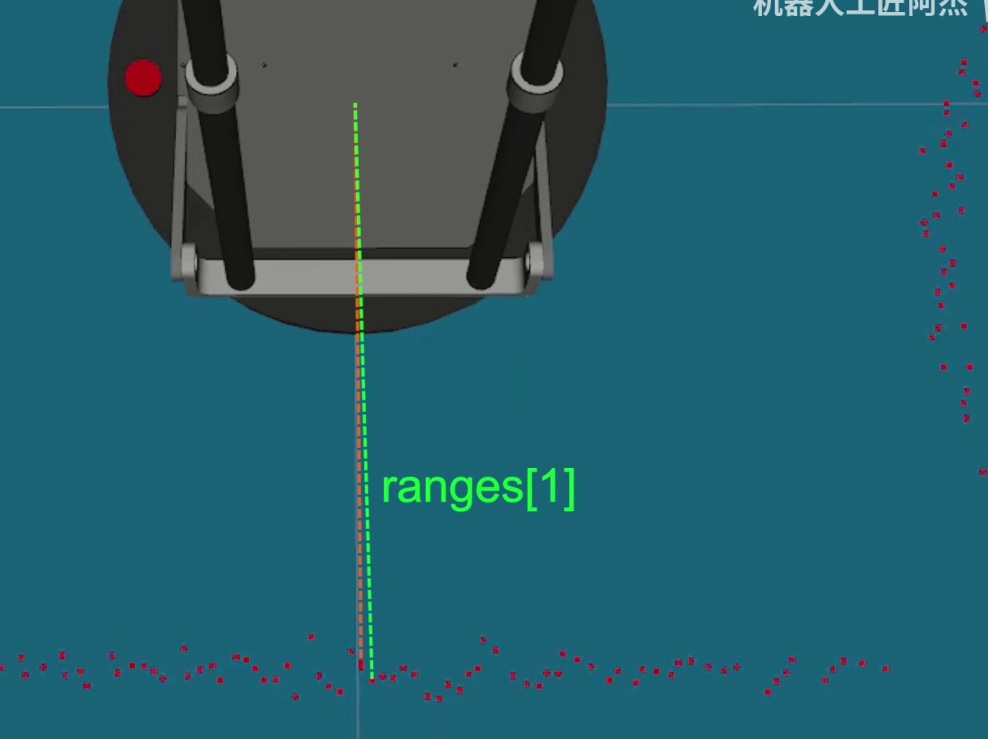
- INF 表示超出范围了,就没有值
- intensities 表示激光雷达的强度
360,对应每个电的强度信息
使用 RViz 观察传感器数据
使用之前的
roslaunch wpr_simulation wpb_simple.launch
打开 RViz
rviz
rviz 界面的操作
rviz是数据观测程序,只是可视化程序
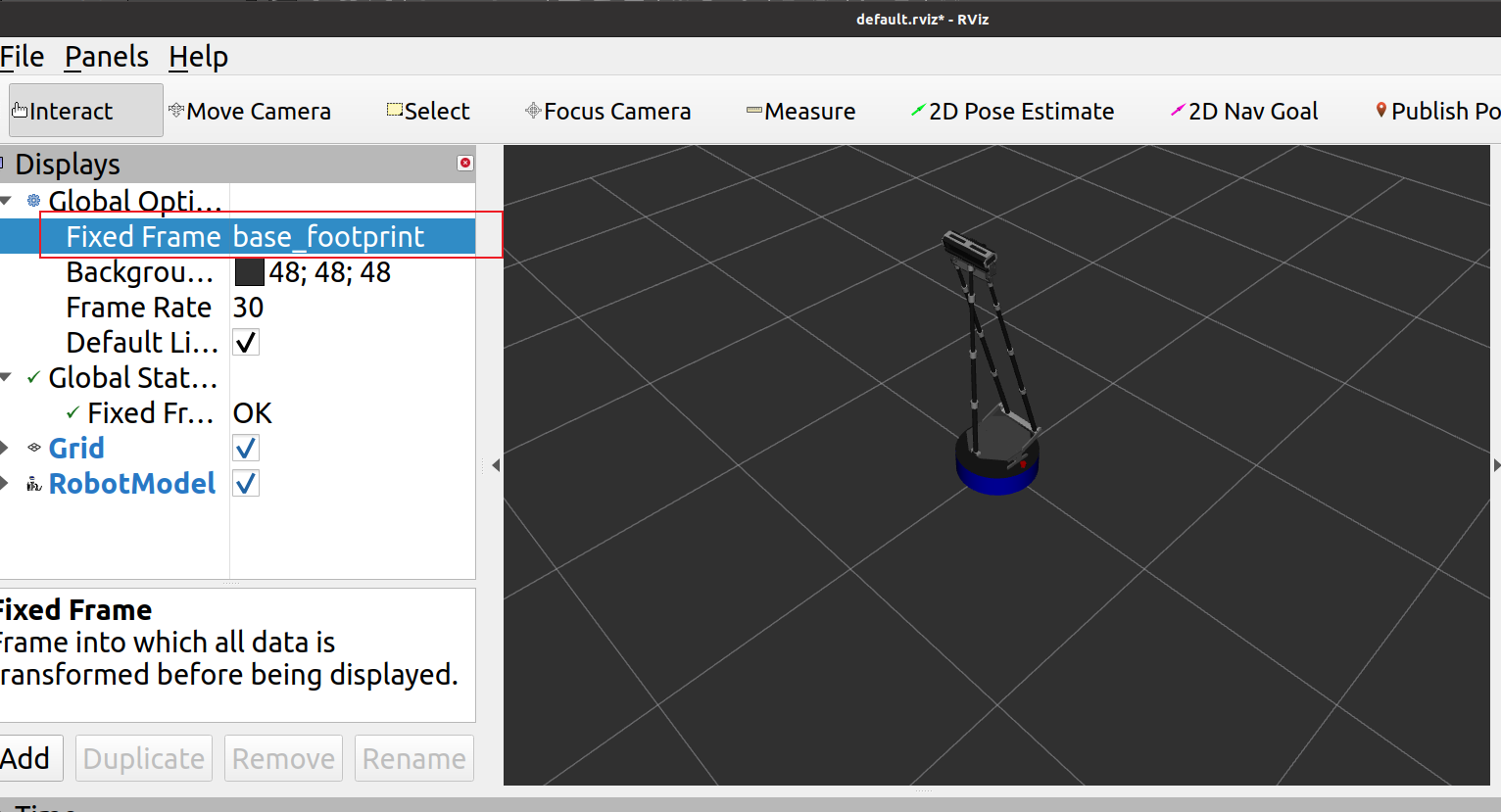
- 选择
Fixed Framee—>base_footprint
-
添加
模型 RobotModel -
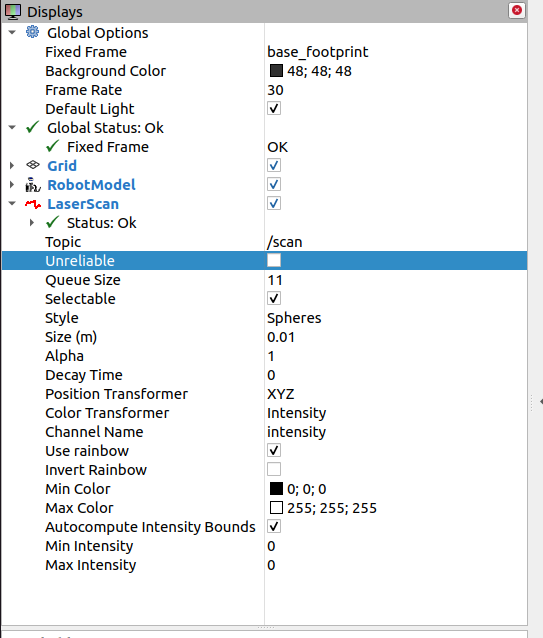
添加
雷达 LaserScan- 话题选择
/scan
- 话题选择
Gazebo 仿真程序
获取雷达的数据
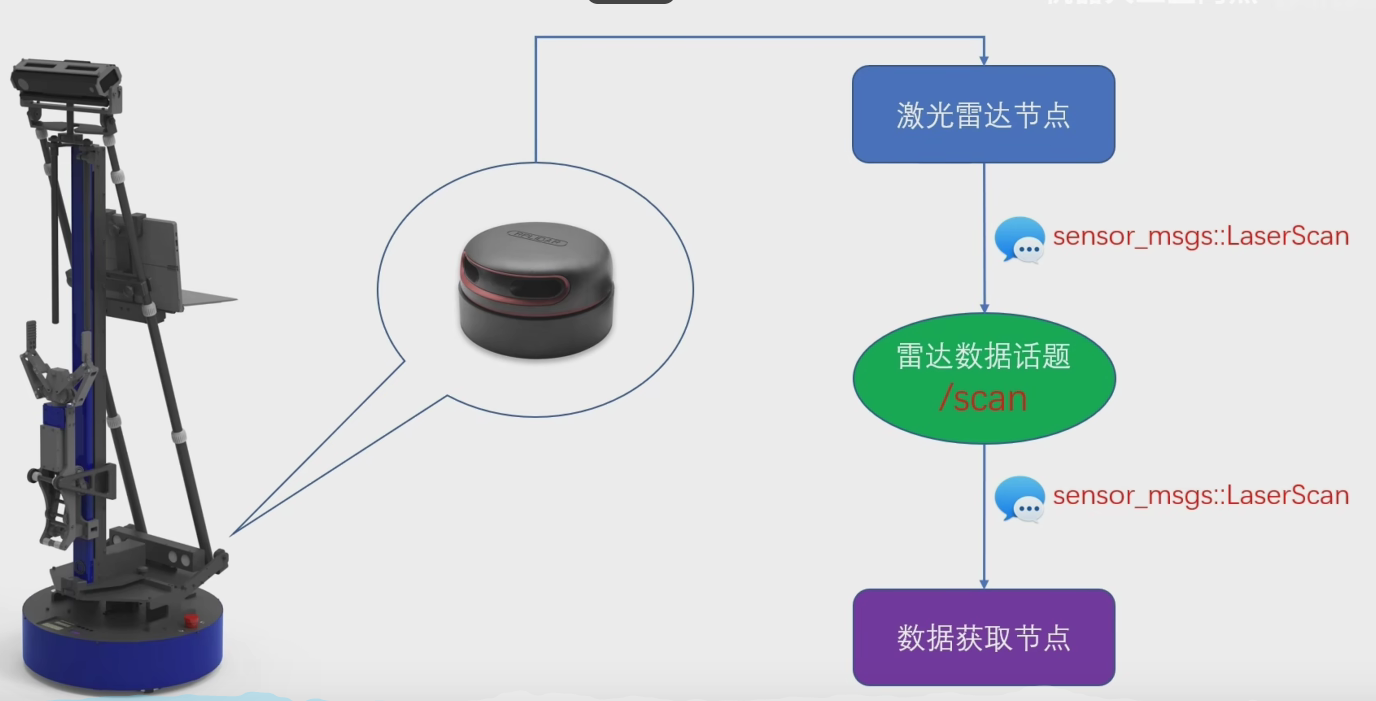
- 消息格式
sensor_msgs
- 话题名称
/scan
C++实现
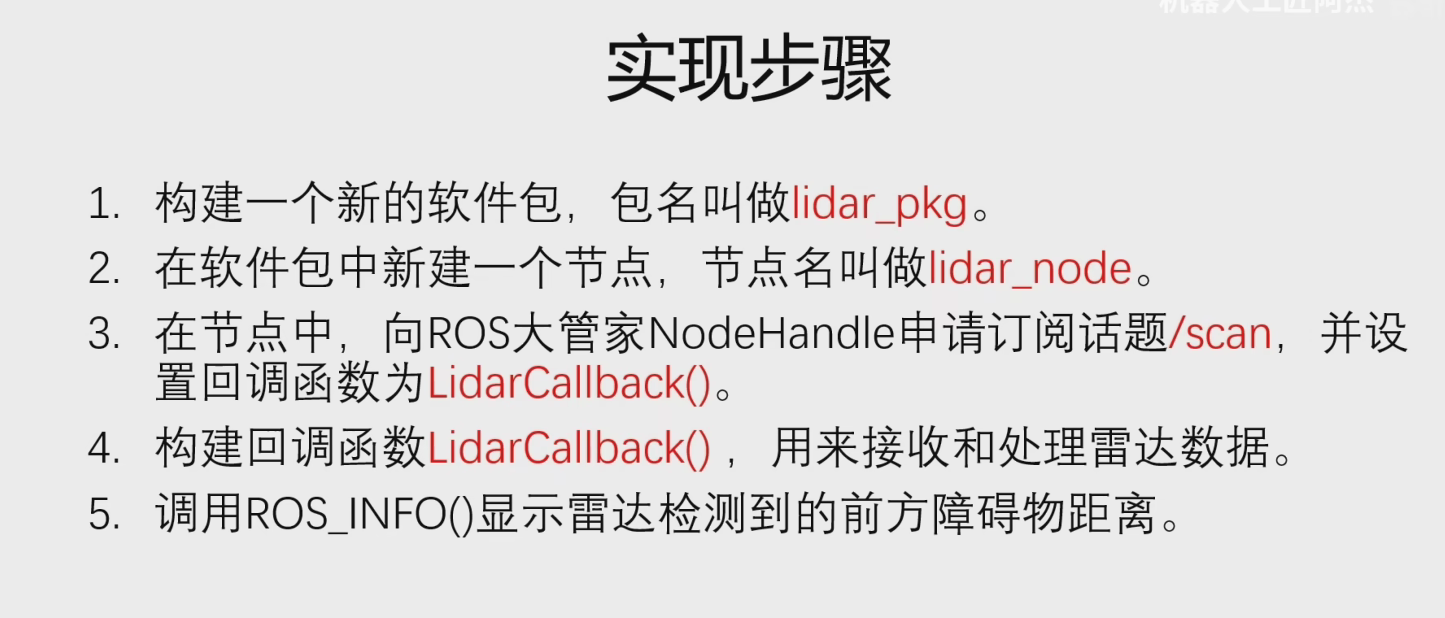
创建 lidar_ppkg
catkin_create_pkg lidar_pkg rospy roscpp sensor_msgs
创建
lidar_node.cpp
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
void LidarCallback(const sensor_msgs::LaserScan msg)
{
float fMidDist = msg.ranges[180];
ROS_INFO("前方测距 ranges[180] = %f 米",fMidDist);
}
int main(int argc,char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"lidar_node");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan",10,&LidarCallback);
ros::spin();
return 0;
}
编译运行
Python实现
lidar_node.py
#!/usr/bin/env python3
# coding=utf-8
import rospy
from sensor_msgs.msg import LaserScan
def lidar_callback(msg:LaserScan):
dist = msg.ranges[180]
rospy.loginfo(f"前方测距 ranges[180] = {dist} 米")
def main():
rospy.init_node("lidar_node")
lidar_sub = rospy.Subscriber("/scan",LaserScan,lidar_callback,queue_size=10)
rospy.spin()
if __name__ == "__main__":
main()
记得 赋予执行权限 然后运行
实现雷达运动避障
C++实现
前方避障
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
#include <geometry_msgs/Twist.h>
ros::Publisher vel_pub;
int nCount =0;
void LidarCallback(const sensor_msgs::LaserScan msg)
{
float fMidDist = msg.ranges[180];
ROS_INFO("前方测距 ranges[180] = %f 米",fMidDist); // c++ 14
// ROS_INFO_STREAM("前方测距 ranges[180] = " << fMidDist << " 米");
if (nCount >0)
{
nCount --;
return;
}
geometry_msgs::Twist vel_cmd;
if (fMidDist < 1.5)
{
vel_cmd.angular.z = 0.3; // trun left
nCount = 50;
}
else
{
vel_cmd.linear.x = 0.05; // foward
}
vel_pub.publish(vel_cmd);
}
int main(int argc,char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"lidar_node");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan",10,&LidarCallback);
// publisher
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
return 0;
}
Python实现
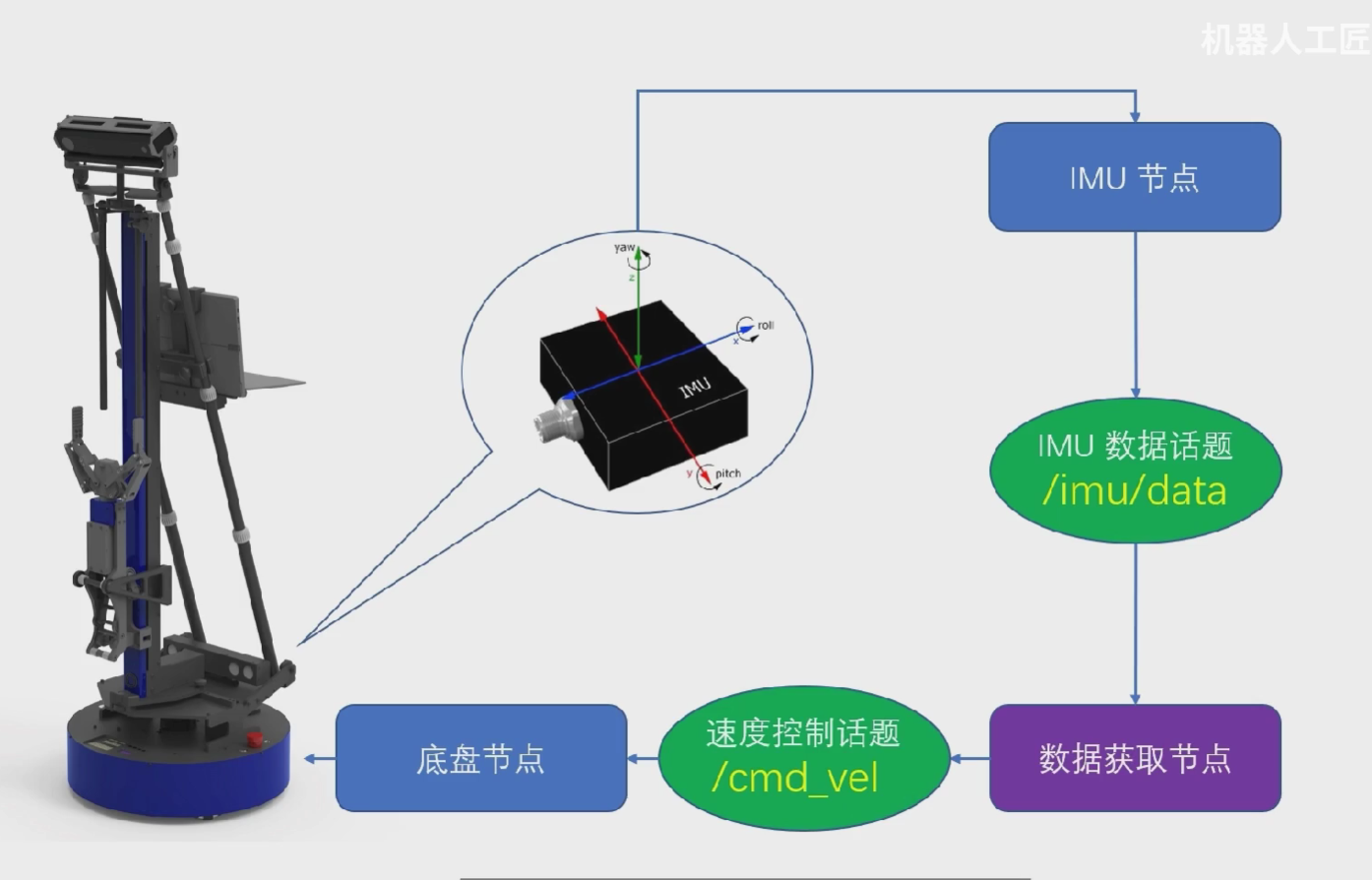
IMU介绍
IMU是 惯性测量单元消息包
sensor_msgs/ImuMessage
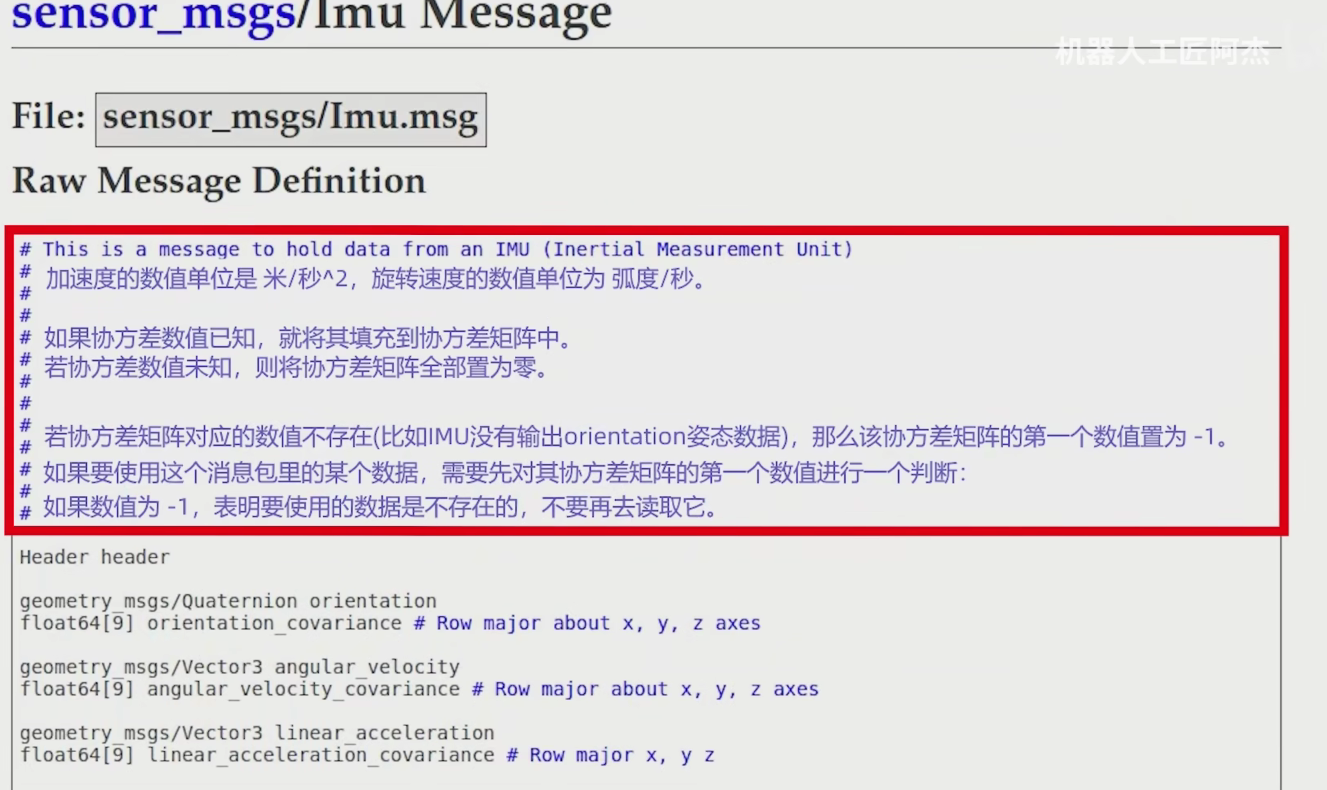
- angular_velocity —> 角速度
- linear_acceleration —> 矢量加速度
- orientation 姿态信息数据
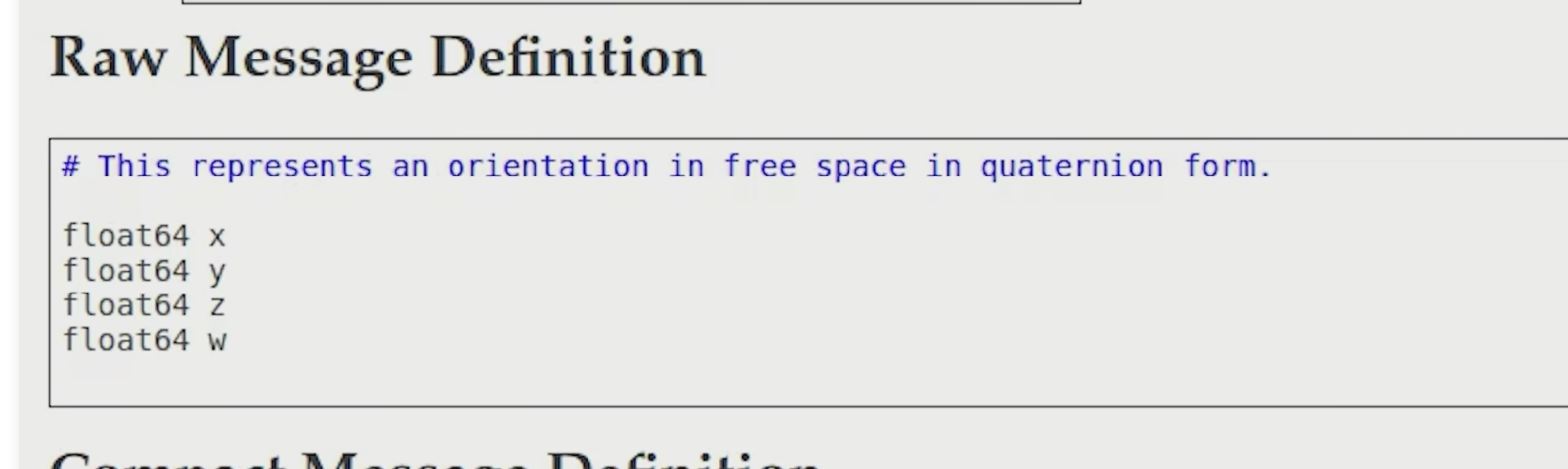
- 使用四元数描述法,为了解决
欧拉角死锁问题
获取IMU数据
IMU发布的 话题
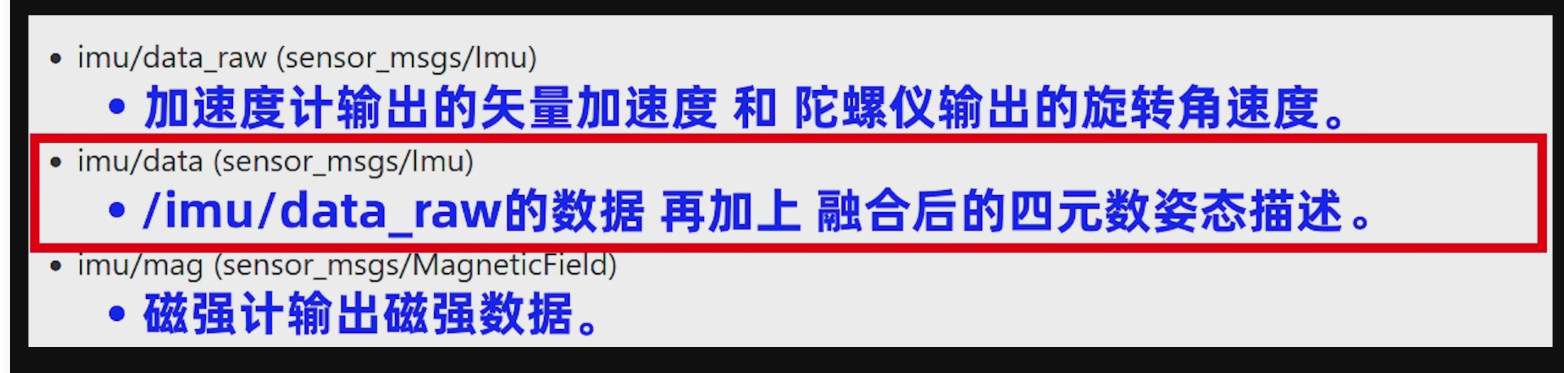
imudata_raw输入data融合后的四元组姿态描述mag只有9轴机器人才有
C++实现
29节
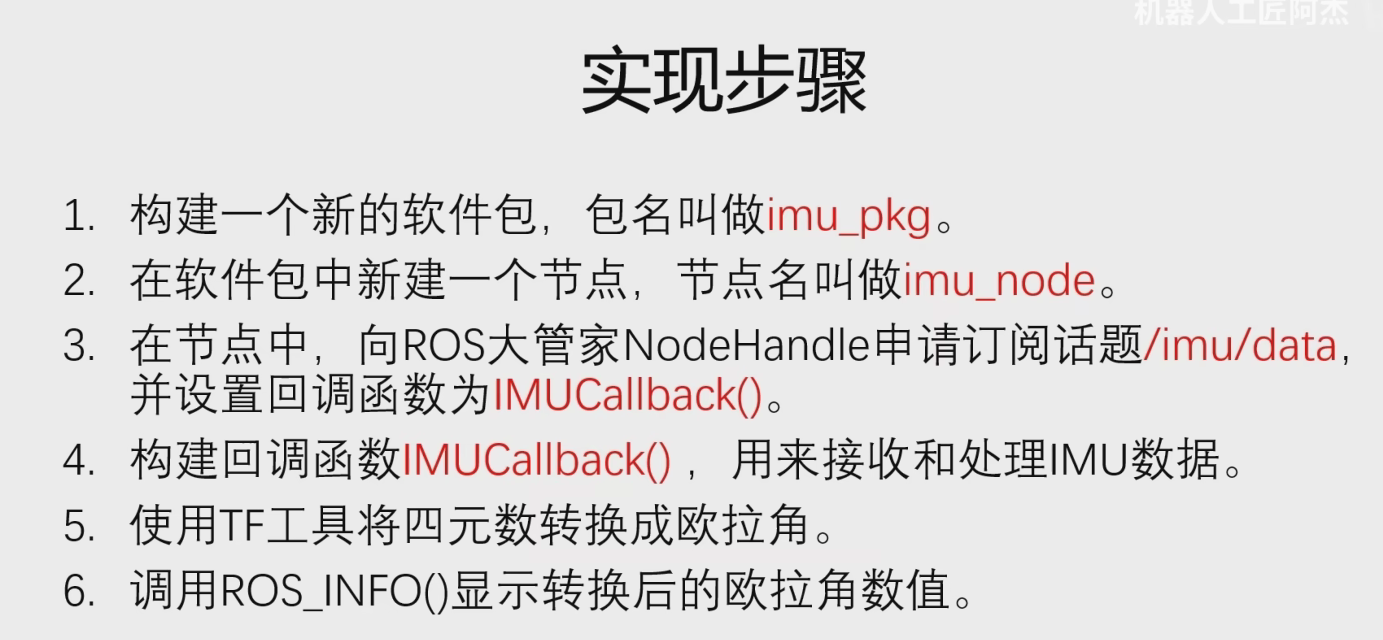
创建 imu_pkg 节点
catkin_craete_pkg imu_pkg rospy roscpp sensor_msgs
imu_node.cpp
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <tf/tf.h>
void IMUCallback(sensor_msgs::Imu msg)
{
if(msg.orientation_covariance[0]<0)
return;
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
double roll,pitch,yaw;
tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw); // rad/s
roll = roll*180/M_PI;
pitch = pitch*180/M_PI;
yaw = yaw*180/M_PI;
ROS_INFO("滚转=%.0f 俯仰=%.0f 朝向=%.0f",roll,pitch,yaw);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"imu_node");
ros::NodeHandle n;
ros::Subscriber imu_sub = n.subscribe("/imu/data",4,IMUCallback);
ros::spin();
return 0;
}
CMakeLists.txt
add_executable(imu_node src/imu_node.cpp)
add_dependencies(imu_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(imu_node
${catkin_LIBRARIES}
)
启动仿真程序,启动运行
Python实现
imu_node.py
#!/usr/bin/env python3
#coding=utf-8
import rospy
from sensor_msgs.msg import Imu
from tf.transformations import euler_from_quaternion
import math
def imu_callback(msg:Imu):
if msg.orientation_covariance[0] <0 : # not exist
return
quaternion =[
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w,
]
data = euler_from_quaternion(quaternion)
data = [i*180/math.pi for i in data]
roll,pitch,yaw = data
rospy.loginfo("滚转=%.0f 俯仰=%.0f 朝向=%.0f",roll,pitch,yaw)
def main():
rospy.init_node("imu_node")
imu_sub = rospy.Subscriber("/imu/data",Imu,imu_callback,queue_size=3)
rospy.spin()
if __name__=="__main__":
main()
启动仿真环境,启动脚本
IMU航向锁定
C++实现
让机器人 可以始终保持一个方向
imu_node.cpp
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <tf/tf.h>
#include <geometry_msgs/Twist.h>
ros::Publisher vel_pub;
void IMUCallback(sensor_msgs::Imu msg)
{
if(msg.orientation_covariance[0]<0)
return;
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
double roll,pitch,yaw;
tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw); // rad/s
roll = roll*180/M_PI;
pitch = pitch*180/M_PI;
yaw = yaw*180/M_PI;
ROS_INFO("滚转=%.0f 俯仰=%.0f 朝向=%.0f",roll,pitch,yaw);
double target_yaw = 90;
double diff_angle = target_yaw -yaw;
geometry_msgs::Twist vel_cmd;
vel_cmd.angular.z = diff_angle*0.01;
vel_pub.publish(vel_cmd);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"imu_node");
ros::NodeHandle n;
ros::Subscriber imu_sub = n.subscribe("/imu/data",4,IMUCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
return 0;
}
python实现
imu_node.py
#!/usr/bin/env python3
#coding=utf-8
import rospy
from sensor_msgs.msg import Imu
from tf.transformations import euler_from_quaternion
from geometry_msgs.msg import Twist
import math
vel_pub = None
def imu_callback(msg:Imu):
if msg.orientation_covariance[0] <0 : # not exist
return
quaternion =[
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w,
]
data = euler_from_quaternion(quaternion)
data = [i*180/math.pi for i in data]
roll,pitch,yaw = data
rospy.loginfo("滚转=%.0f 俯仰=%.0f 朝向=%.0f",roll,pitch,yaw)
target_yaw = 180
diff_angle = target_yaw - yaw
vel_cmd = Twist()
vel_cmd.angular.z = diff_angle * 0.01
vel_cmd.linear.x = 0.1
vel_pub.publish(vel_cmd)
def main():
global vel_pub
rospy.init_node("imu_node")
imu_sub = rospy.Subscriber("/imu/data",Imu,imu_callback,queue_size=10)
vel_pub = rospy.Publisher("/cmd_vel",Twist,queue_size=10)
rospy.spin()
if __name__=="__main__":
main()