ROS中的栅格地图
地图数据格式
ROS中默认的栅格为 0.05m
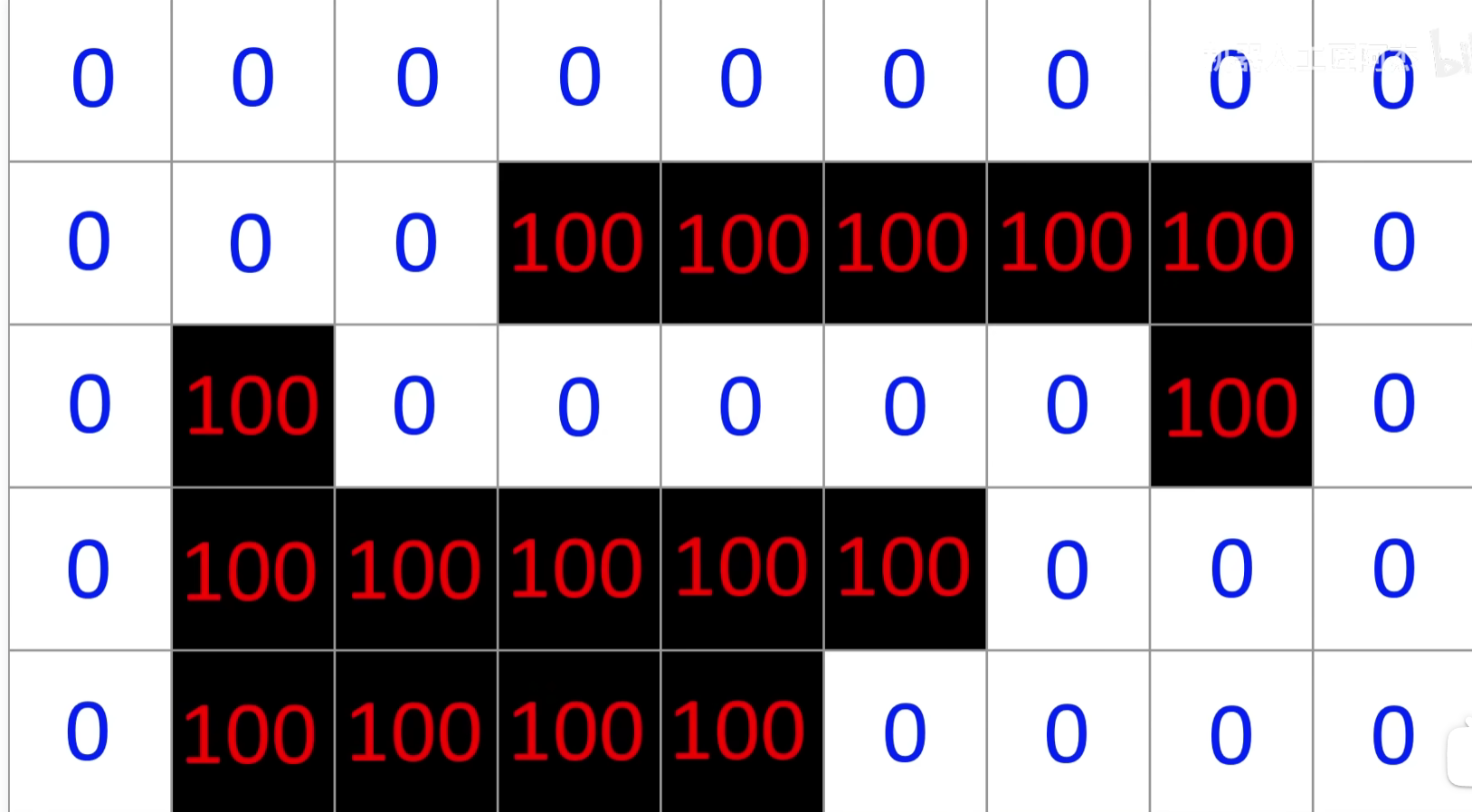
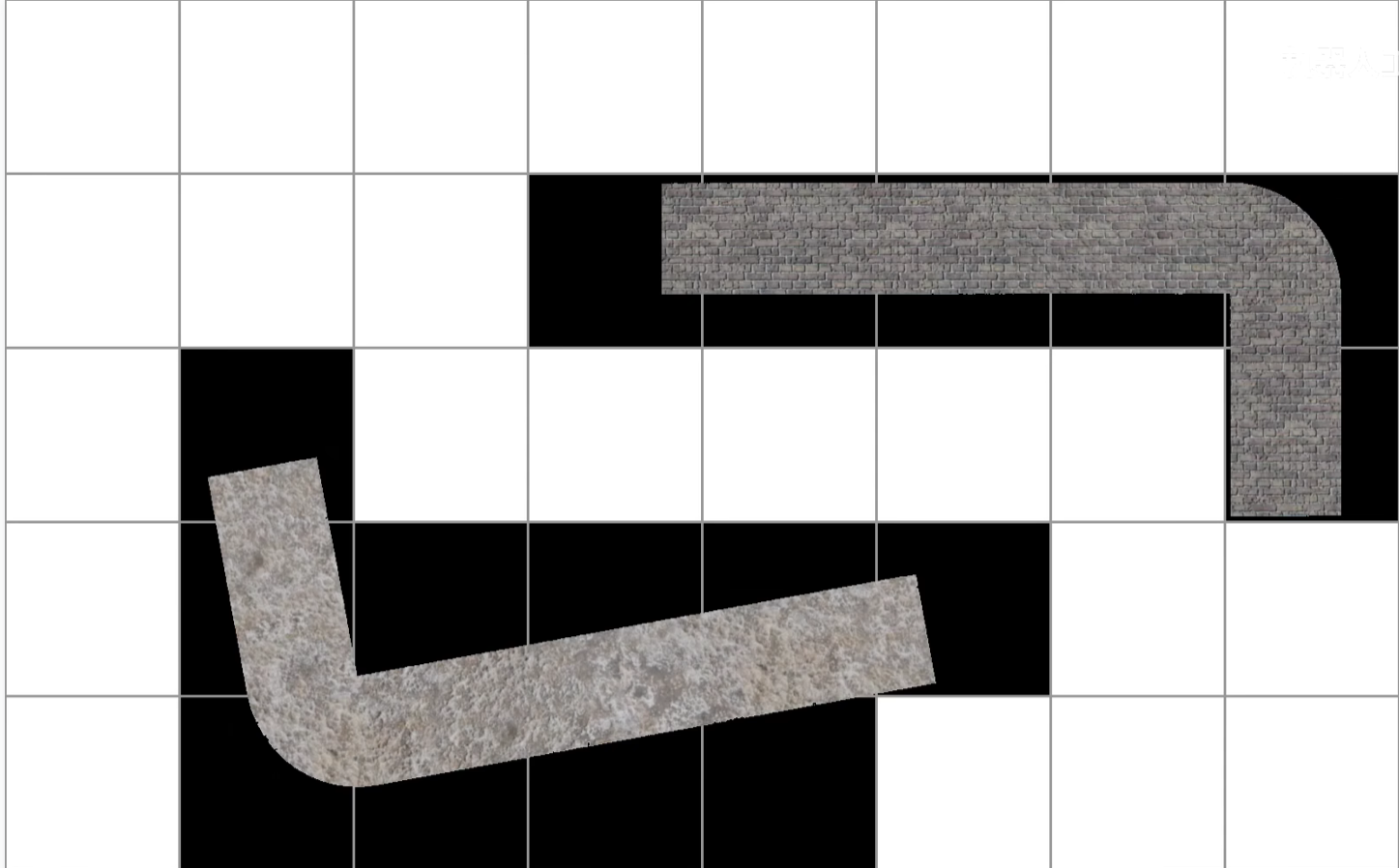
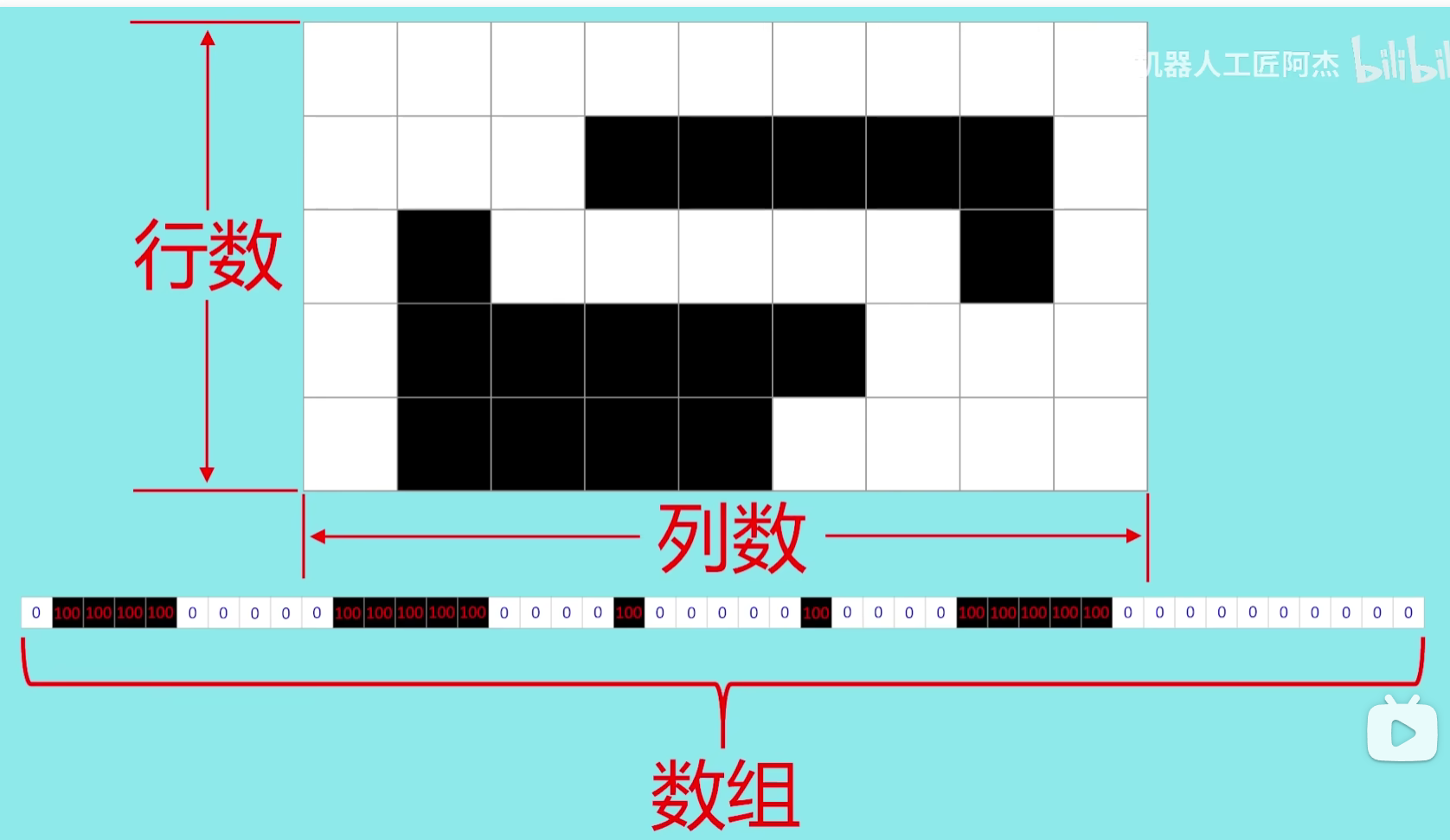
栅格地图转换为一个 二维数组 -----> 一维数组
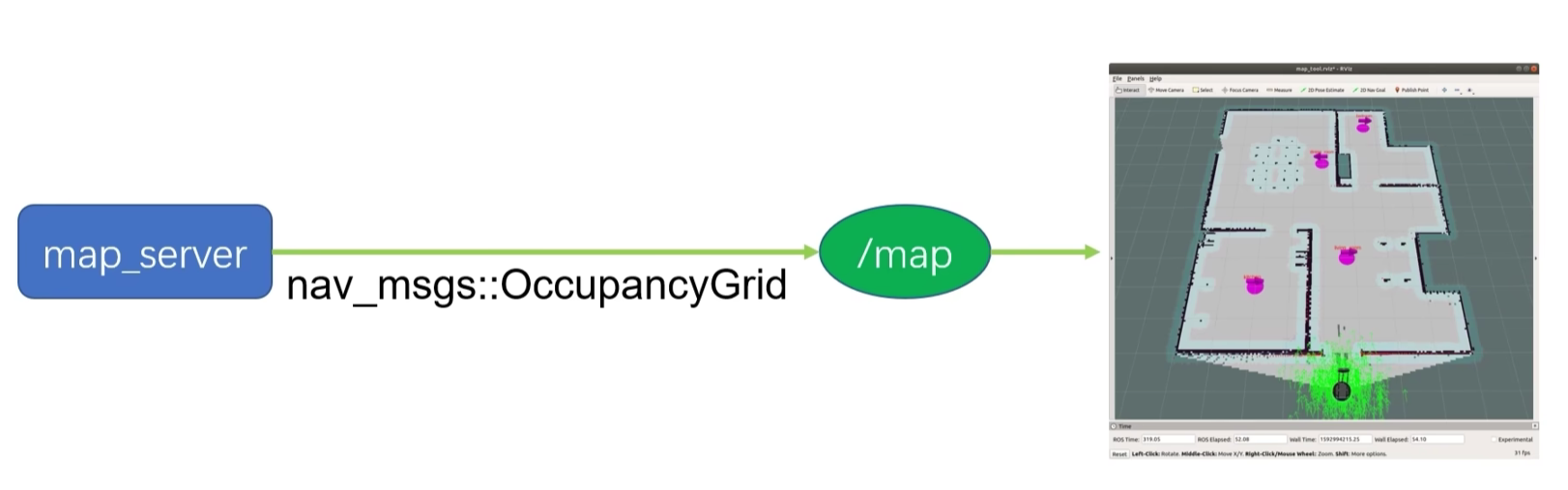
nav_msgs
这种数组 + 行列数消息便是 ros中 map_server 中 nav_msgs
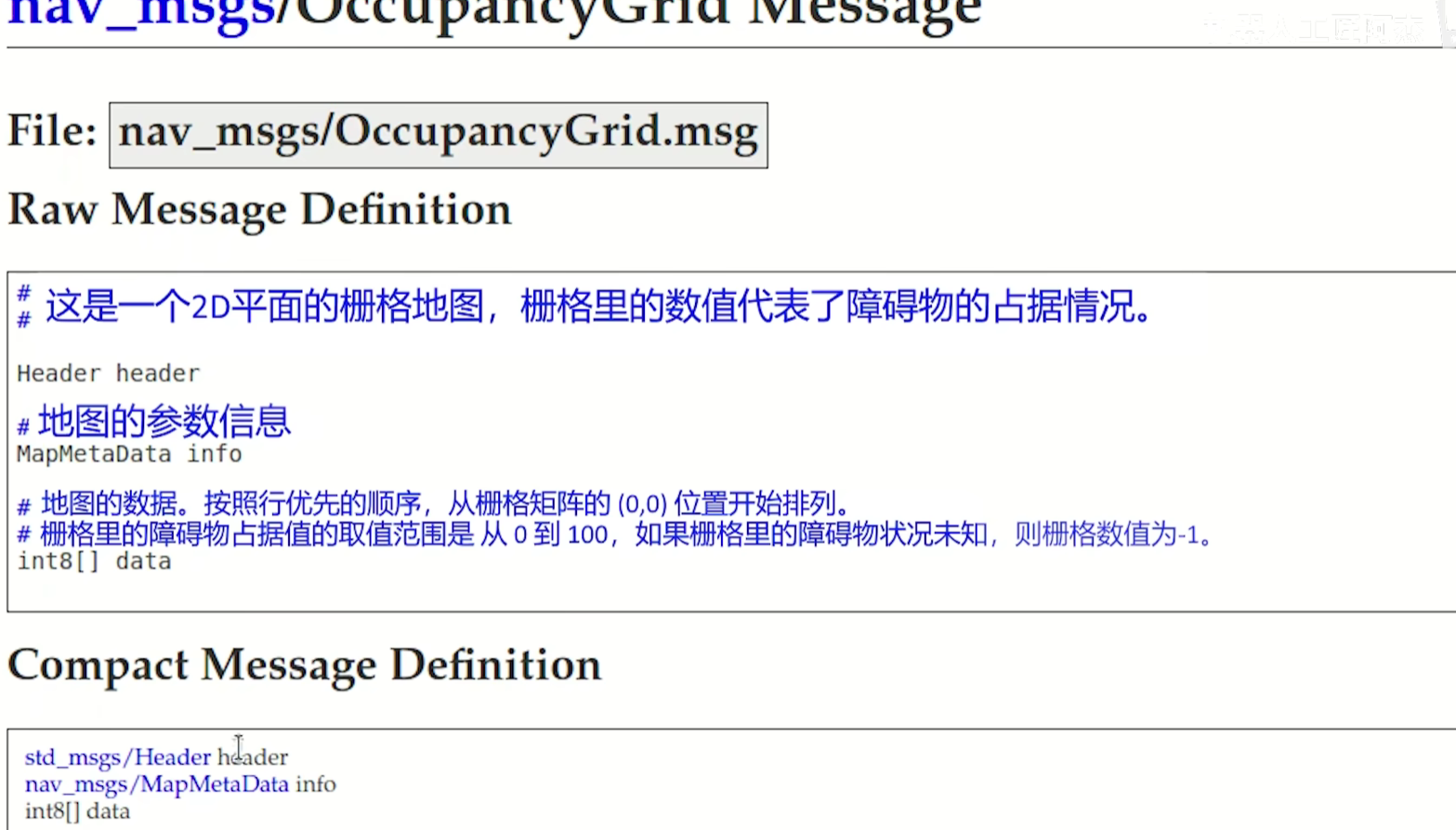
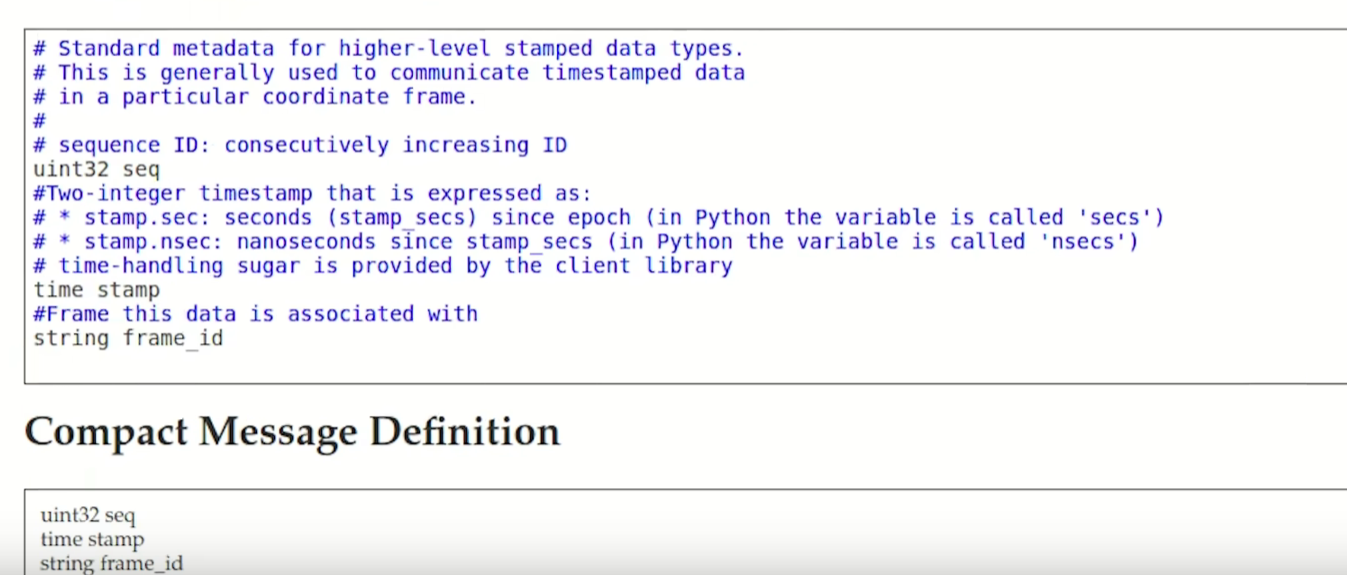
- header
- seq
- stamp
- frame_id
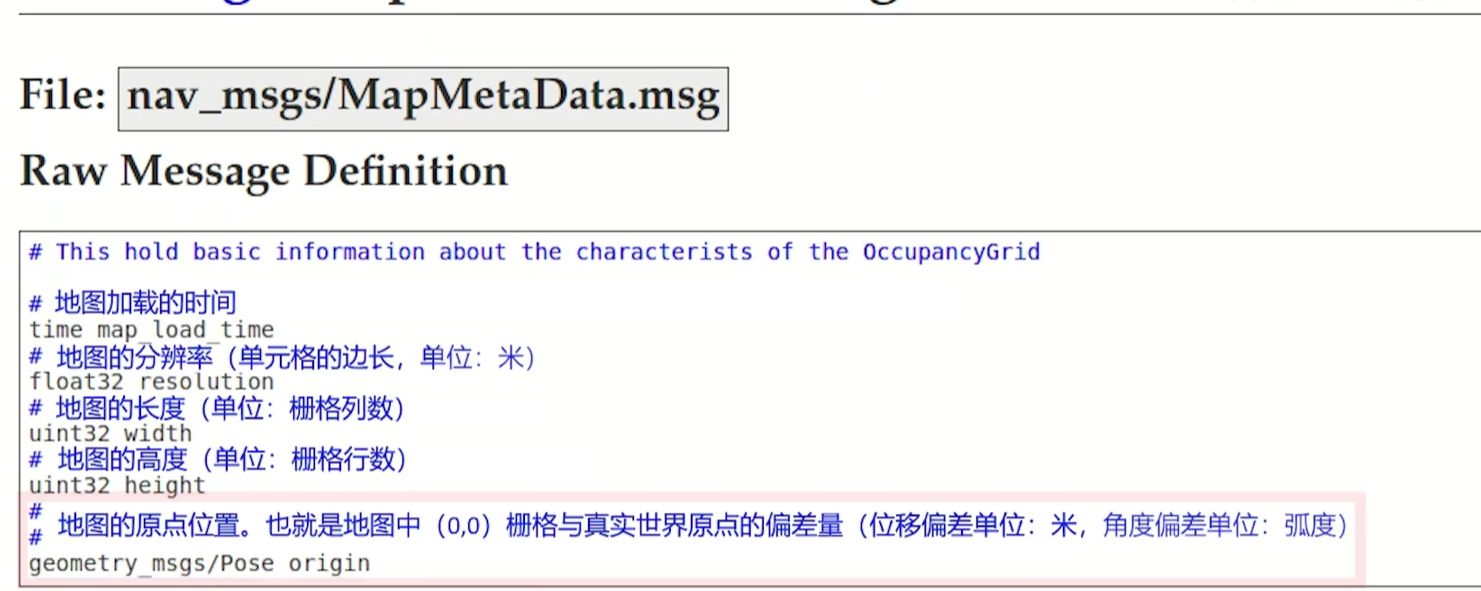
- info 栅格地图信息
- load_time
- resolution
- width
- height
- []data 一维数组
- [0,0] 位置是 栅格地图
左下角的位置 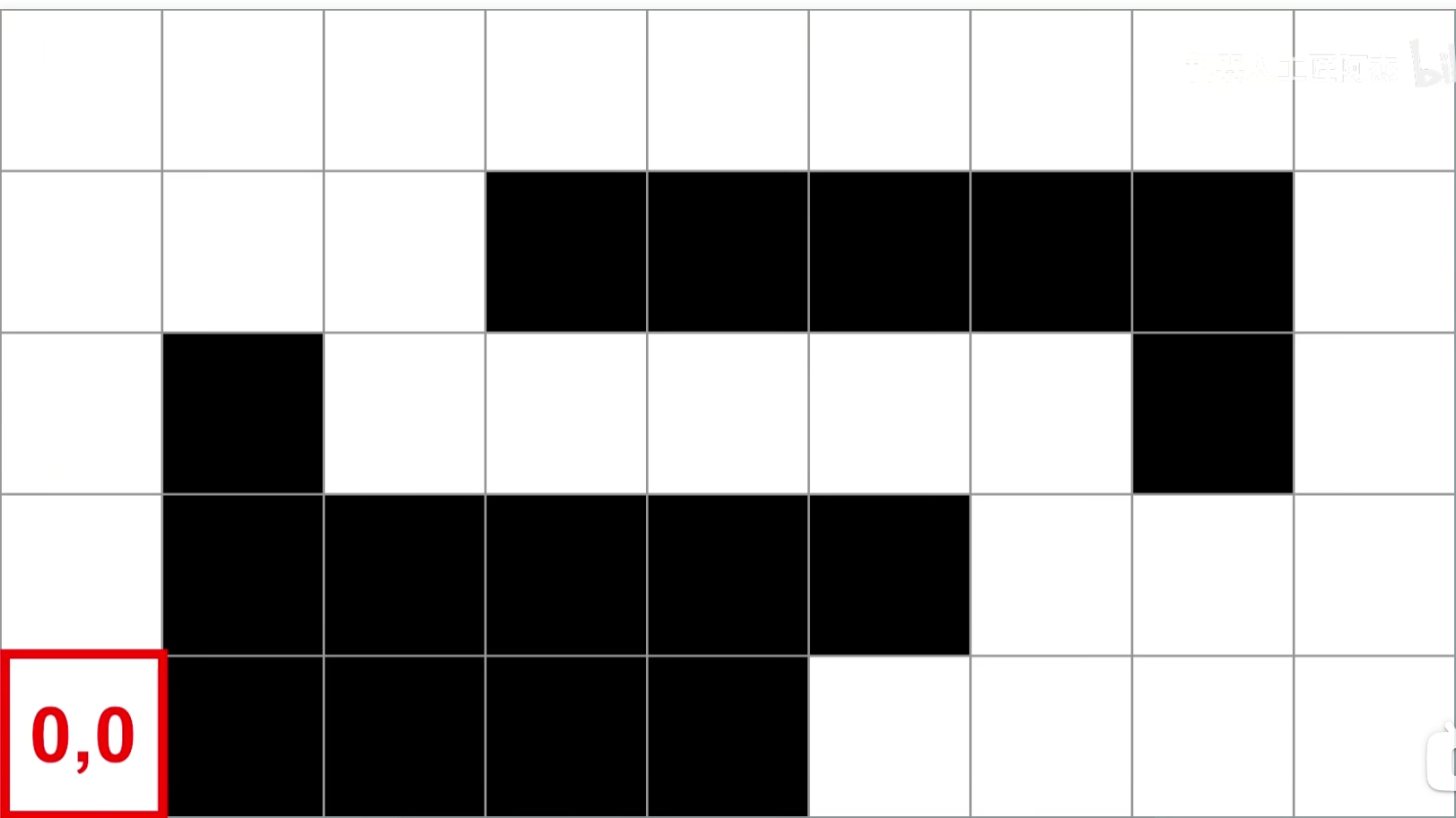
- [0,0] 位置是 栅格地图
发布地图消息包
栅格地图样式

C++实现
map_pub_node.cpp
创建软件包
catkin_create_pkg map_pkg rospy roscpp nav_msgs
- map_pub_node.cpp
#include <ros/ros.h>
#include <nav_msgs/OccupancyGrid.h>
int main(int argc, char *argv[])
{
ros::init(argc,argv,"map_pub_node");
ros::NodeHandle n;
ros::Publisher pub = n.advertise<nav_msgs::OccupancyGrid>("/map",10);
ros::Rate r(1);
while (ros::ok())
{
nav_msgs::OccupancyGrid msg;
msg.header.frame_id = "map";
// 设置时间
msg.header.stamp = ros::Time::now();
// 设置起始点
msg.info.origin.position.x = 0,
msg.info.origin.position.y = 0,
// 设置地图尺寸
msg.info.resolution = 1.0;
msg.info.width = 4;
msg.info.height = 2;
msg.data.resize(4*2);
msg.data[0]= 100;
msg.data[1]= 100;
msg.data[2]= 0;
msg.data[3]= -1;
pub.publish(msg);
ROS_INFO("RUNNING!");
r.sleep();
}
return 0;
}
CmakeList.txt
末尾添加上
add_executable(map_pub_node src/map_pub_node.cpp)
add_dependencies(map_pub_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(map_pub_node
${catkin_LIBRARIES}
)
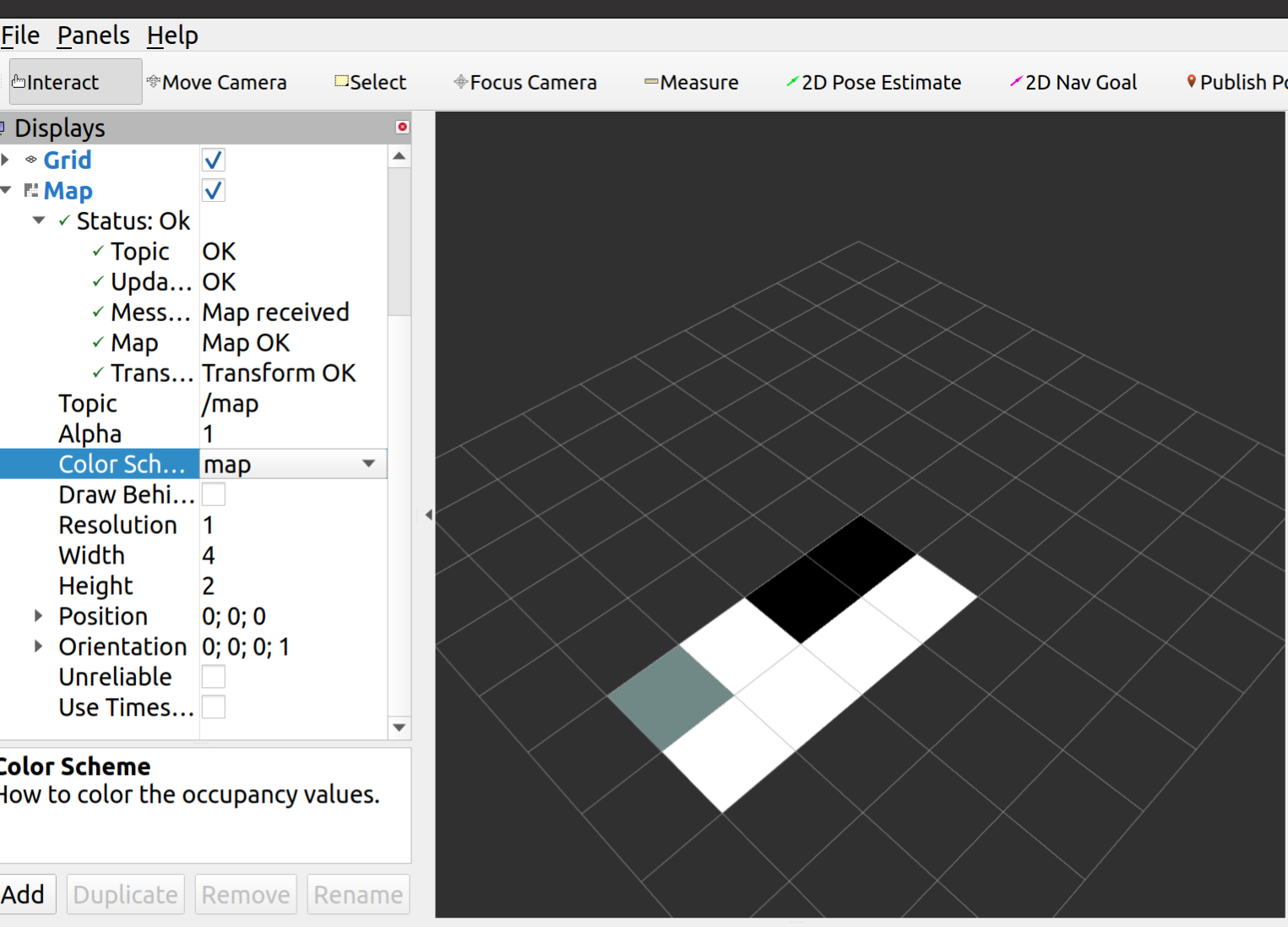
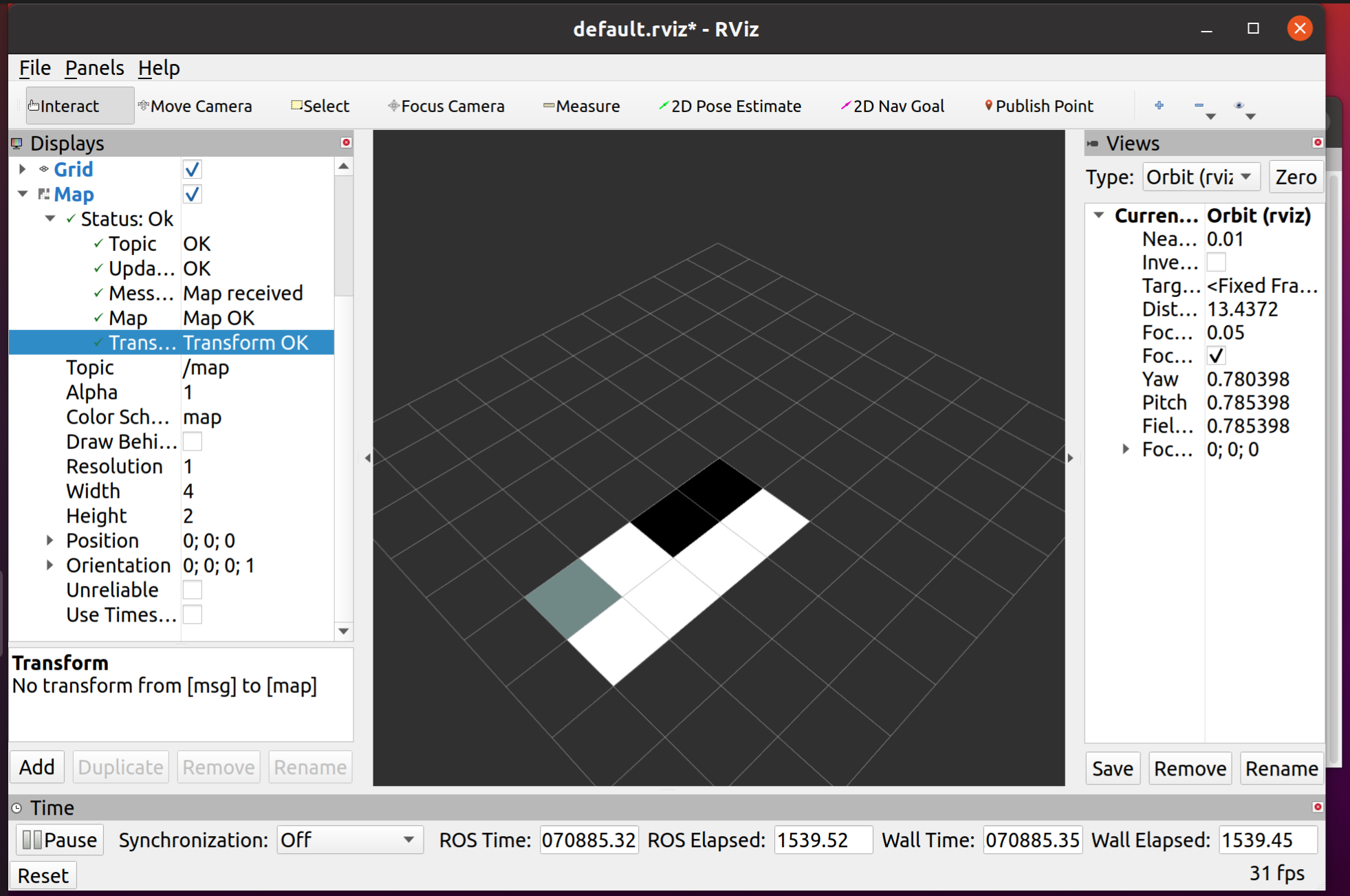
运行效果
Python实现
map_pub_node.py
#!/usr/bin/env python3
# coding = utf-8
import rospy
from nav_msgs.msg import OccupancyGrid
def main():
rospy.init_node("map_pub_node")
pub = rospy.Publisher("/map",OccupancyGrid,queue_size=10)
rate = rospy.Rate(1) # 1hz
while not rospy.is_shutdown():
msg = OccupancyGrid()
msg.header.frame_id = "map"
msg.header.stamp = rospy.Time.now()
# 地图描述信息
msg.info.origin.position.x = 0
msg.info.origin.position.y = 0
msg.info.resolution = 1.0 # 地图分辨率
msg.info.width = 4
msg.info.height = 2
# 地图数据的赋值
msg.data =[0]*4*2
msg.data[0] = 100
msg.data[1] = 100
msg.data[2] = 0
msg.data[3] = -1
pub.publish(msg)
rospy.loginfo("running")
rate.sleep()
if __name__ == "__main__":
main()
SLAM
SLAM ----> Simultaneous Localization And Mapping
同时定位与地图创建
Localization && Mapping
Hector_Mapping 年轻人的第一次SLAM建图
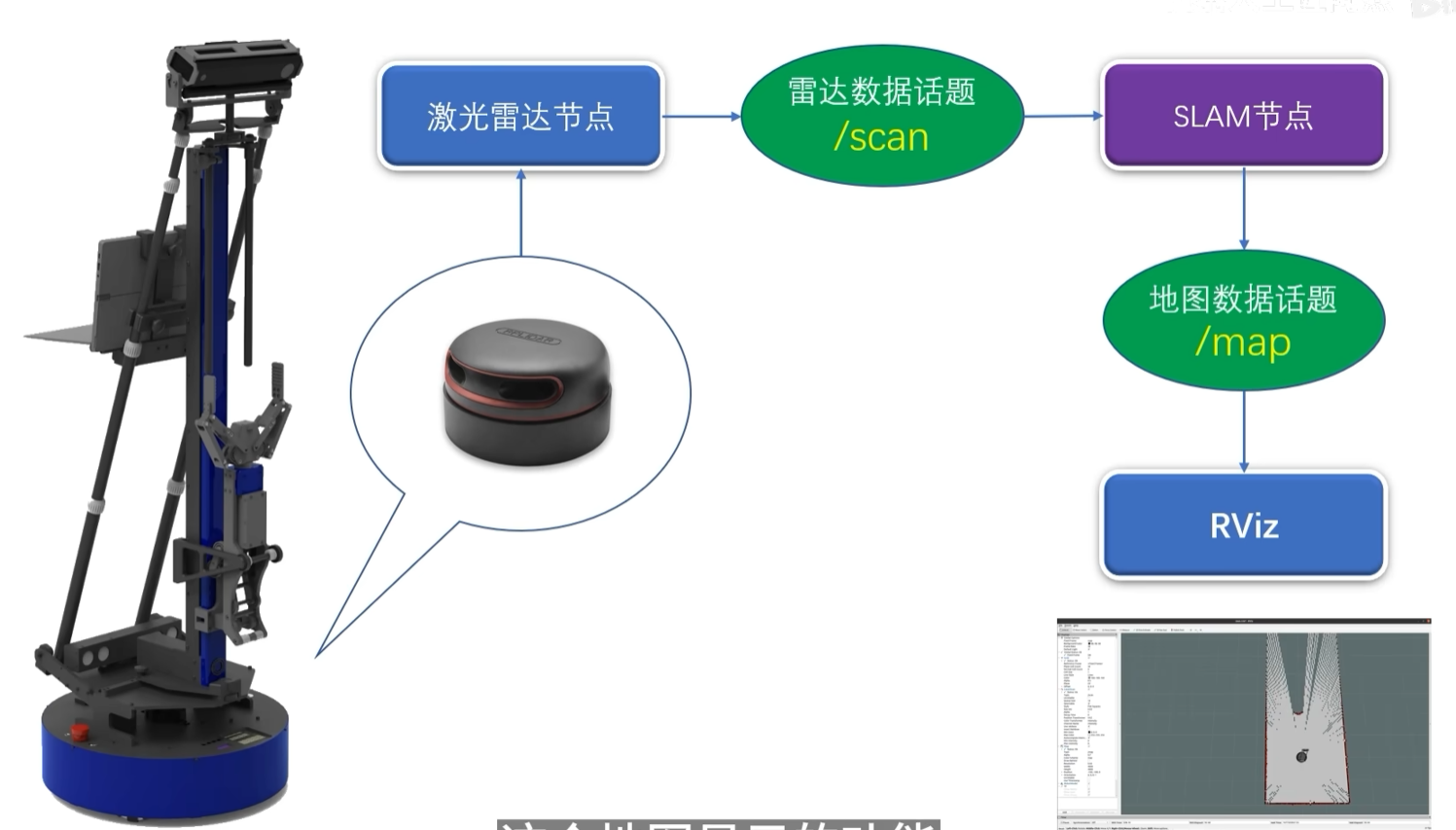
SLAM节点,我们直接复用别人的 SLAM ,等我们学会了再去研究这个节点写吧!!!复用!
下载 与 启动仿真环境
Hector_mapping 下载
sudo apt install ros-noetic-hector-mapping
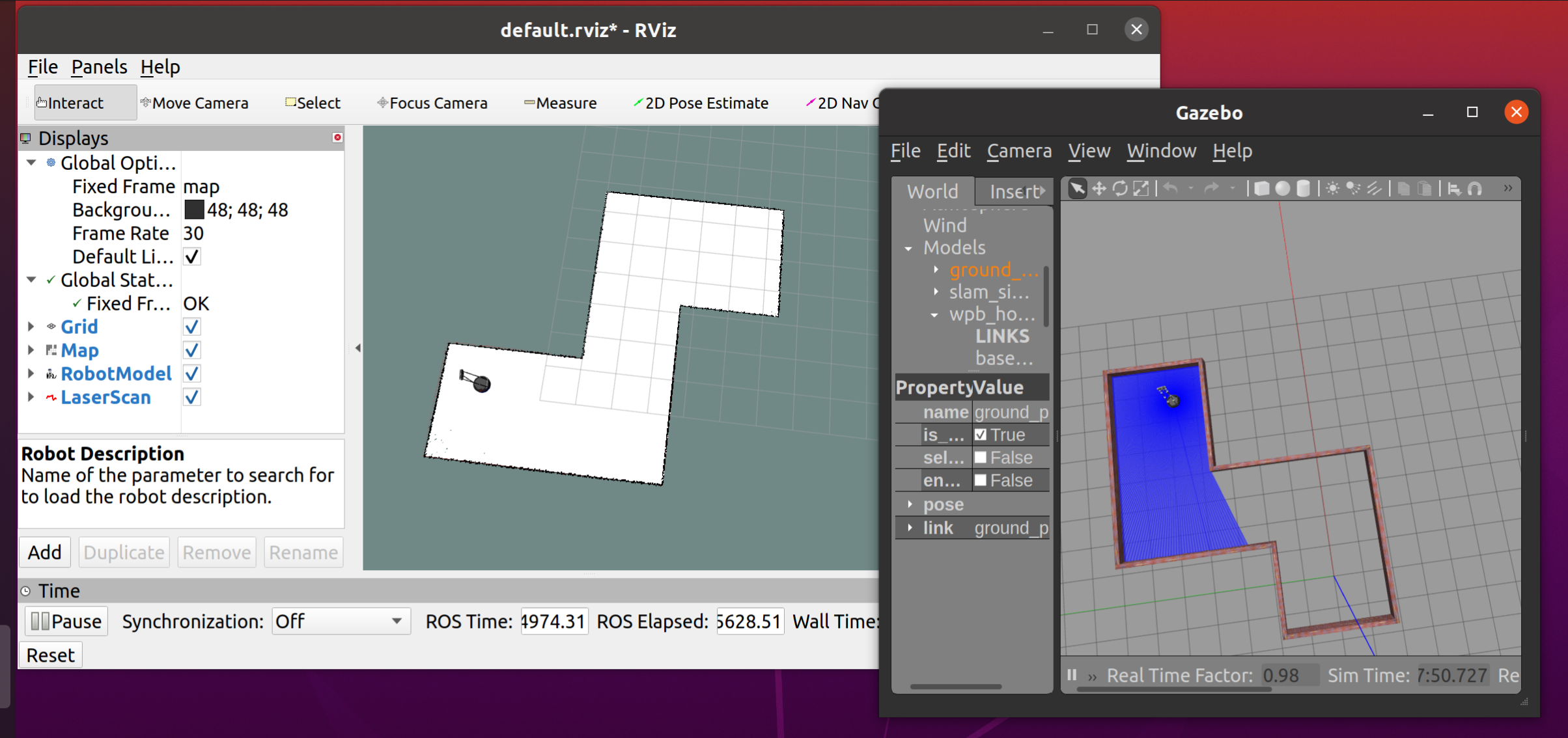
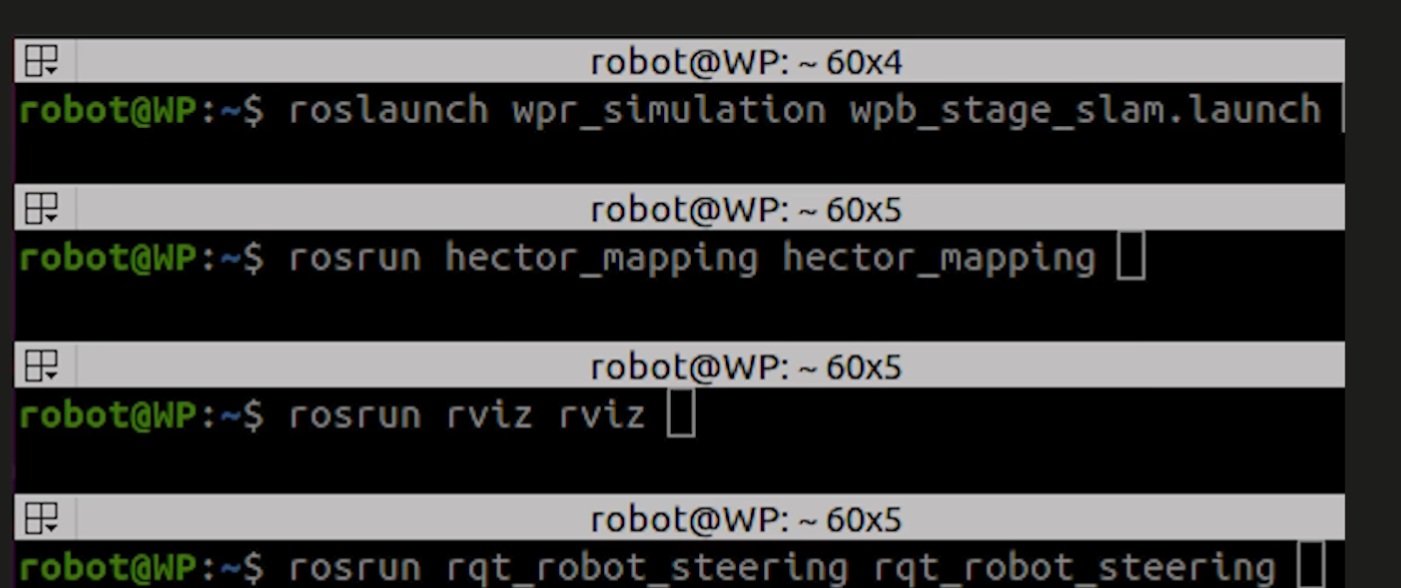
roslaunch wpr_simulation wpb_stage_slam.launch
启动slam建图程序
rosrun hector_mapping hector_mapping
启动 rviz 程序
rviz
启动控制程序
rosrun rqt_robot_steering rqt_robot_steering
使用控制程序来控制其运动
通过launch文件来启动Hector_Mapping建图
创建 slam_pkg 包
catkin_create_pkg slam_pkg roscpp rospy std_msgs
将这些指令全部写入到一个launch文件中
hector.launch
<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" />
<node pkg="rviz" type="rviz" name="rviz" />
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering" />
</launch>
"$(find wpr_simulation)"

编译
编译的目的是为了让这个 slam_launch 文件进入 ros工作环境
保存 rviz 配置
在rviz下,选择 save config as
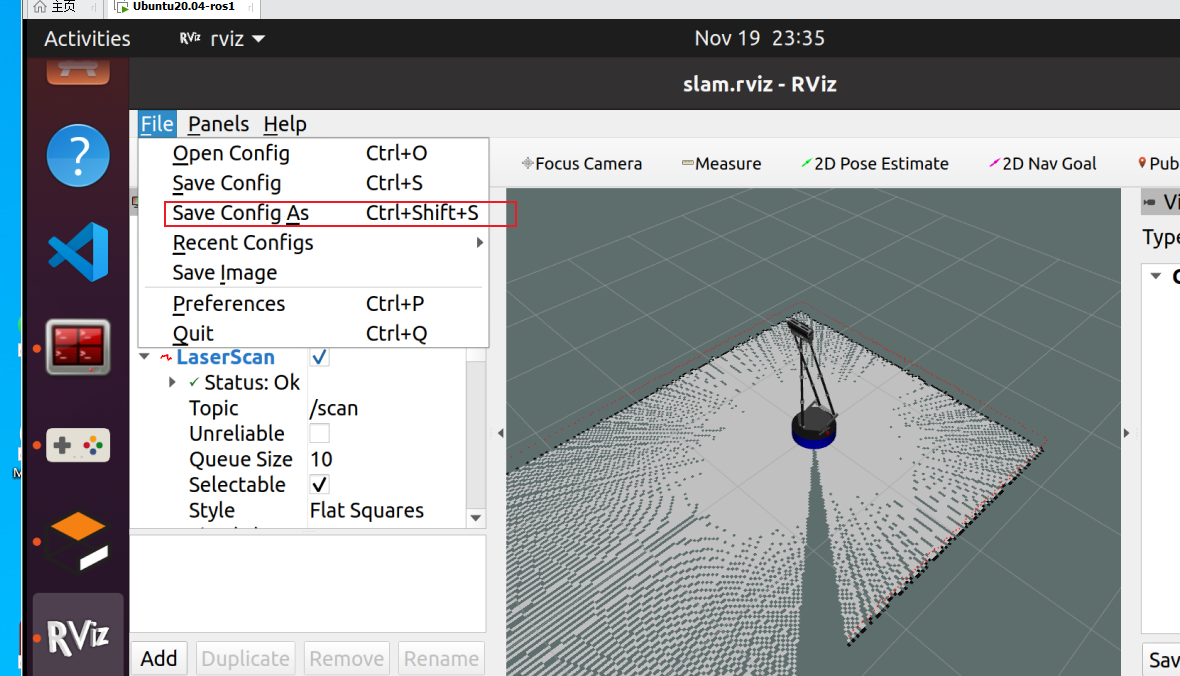
存储到
~/catkin_ws/src/slam_pkg/rviz/
rviz 加载配置信息启动
rosrun rviz rviz -d /home/ysc/catkin_ws/src/slam_pkg/rviz/slam.rviz
修改 launch信息
hector.launch
<launch>
<!-- 载入机器人 和 SLAM 的仿真场景 -->
<!-- 实体机器人就启动实体的启动程序 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch" />
<!-- Hector SLAM -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" />
<!-- Rviz 显示 -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz" />
<!-- 运动控制 -->
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering" />
</launch>
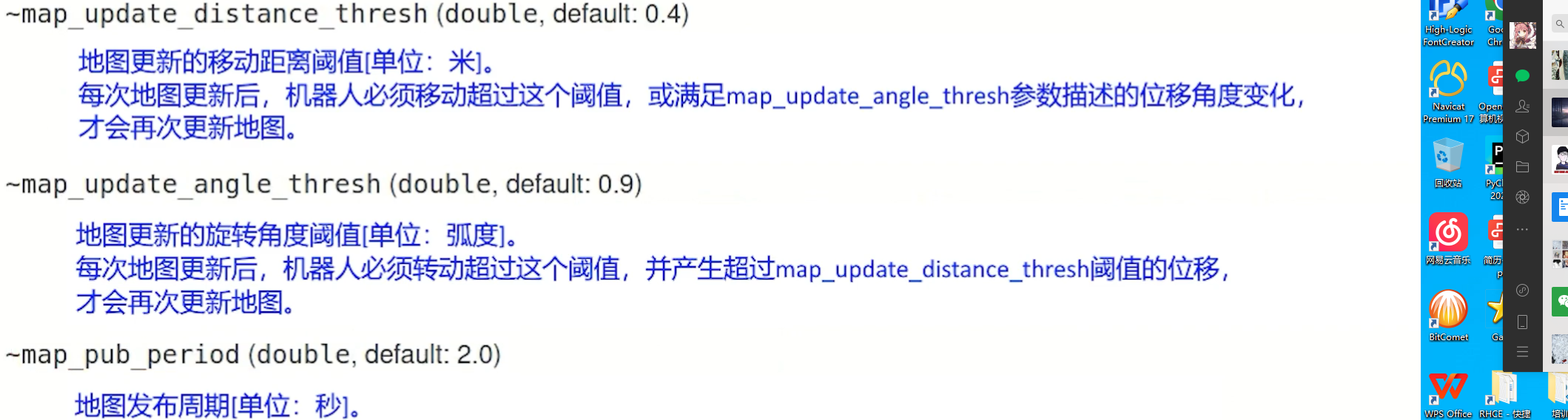
Hector_Mapping 参数
我们修改 这几个参数
修改 hector.launch
<launch>
<!-- 载入机器人 和 SLAM 的仿真场景 -->
<!-- 实体机器人就启动实体的启动程序 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch" />
<!-- Hector SLAM -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<param name="map_update_distance_thresh" value="0.1" />
<param name="map_update_angle_thresh" value="0.1" />
<param name="map_pub_period" value="0.1" />
</node>
<!-- Rviz 显示 -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz" />
<!-- 运动控制 -->
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering" />
</launch>
怎么看出差距
比较一下呗
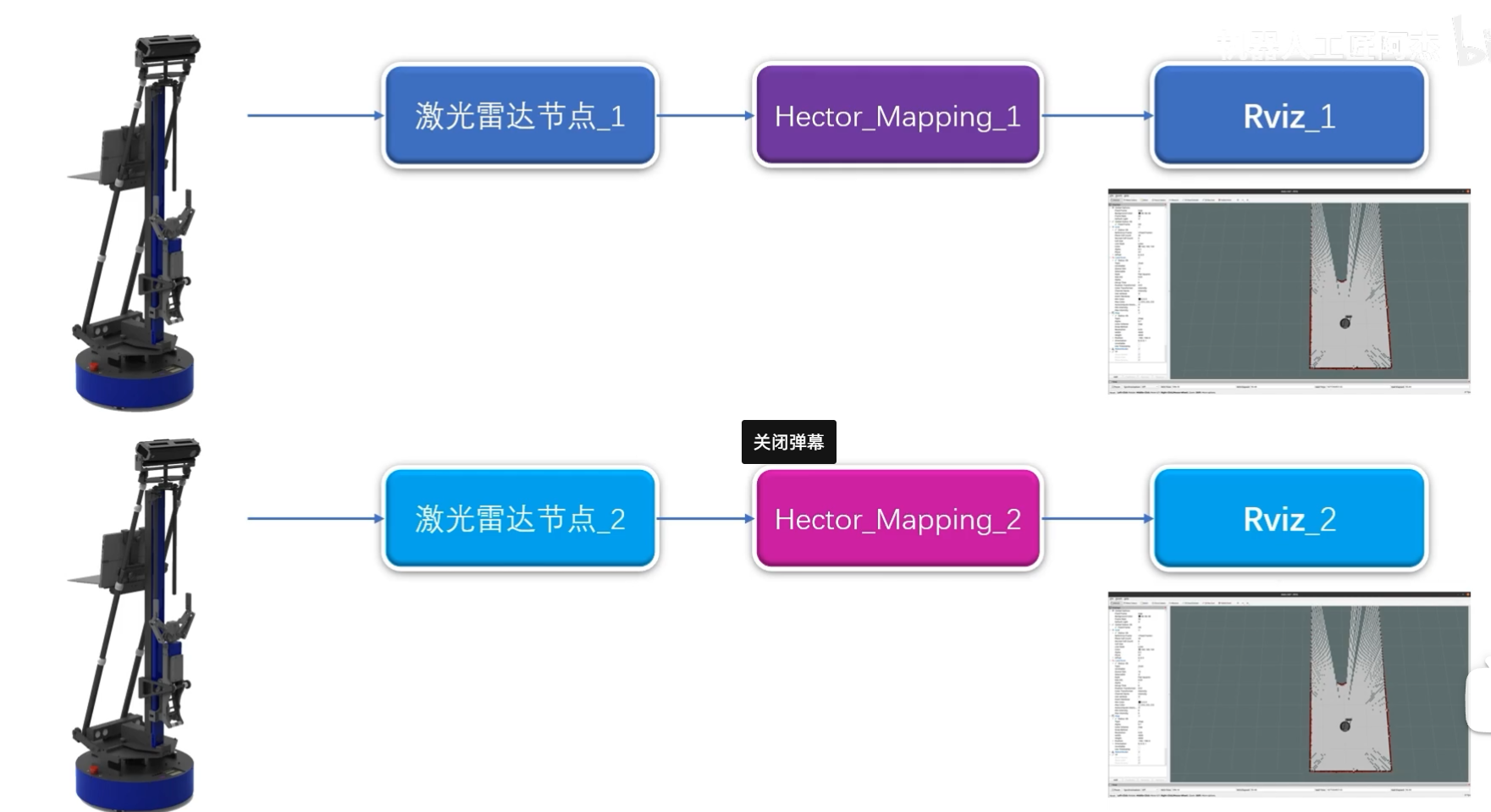
创建一个 companies.launch
<launch>
<!-- 第一个 Hector_Mapping 建图节点 -->
<group ns="slam_1">
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping_1">
<param name="map_update_distance_thresh" value="0.5"/>
<param name="map_update_angle_thresh" value="0.5" />
<param name="map_pub_period" value="0.2" />
<param name="map_frame" value="slam_1/map" />
<param name="base_frame" value="slam_1/base_footprint" />
<param name="odom_frame" value="slam_1/odom" />
</node>
</group>
<!-- 第二个 Hector_Mapping 建图节点 -->
<group ns="slam_2">
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping_2">
<param name="map_update_distance_thresh" value="0.1"/>
<param name="map_update_angle_thresh" value="0.1" />
<param name="map_pub_period" value="0.2" />
<param name="map_frame" value="slam_2/map" />
<param name="base_frame" value="slam_2/base_footprint" />
<param name="odom_frame" value="slam_2/odom" />
</node>
</group>
<!-- **************************** 分割线 **************************** -->
<!-- 载入 SLAM 的仿真场景 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find wpr_simulation)/worlds/slam_simple.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="recording" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- 载入 1号机器人 -->
<include file="$(find wpr_simulation)/launch/wpb_slam_template.launch">
<arg name="robot_namespace" value="slam_1" />
<arg name="local_x" value="0" />
<arg name="local_y" value="-0.3" />
<arg name="local_yaw" value="0" />
</include>
<!-- 载入 2号机器人 -->
<include file="$(find wpr_simulation)/launch/wpb_slam_template.launch">
<arg name="robot_namespace" value="slam_2" />
<arg name="local_x" value="0" />
<arg name="local_y" value="0.3" />
<arg name="local_yaw" value="0" />
</include>
<!-- 运动控制 -->
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering"/>
<!-- 速度话题分流 -->
<node pkg = "topic_tools" type = "relay" name = "relay_1" args="/cmd_vel /slam_1/cmd_vel" />
<node pkg = "topic_tools" type = "relay" name = "relay_2" args="/cmd_vel /slam_2/cmd_vel" />
</launch>
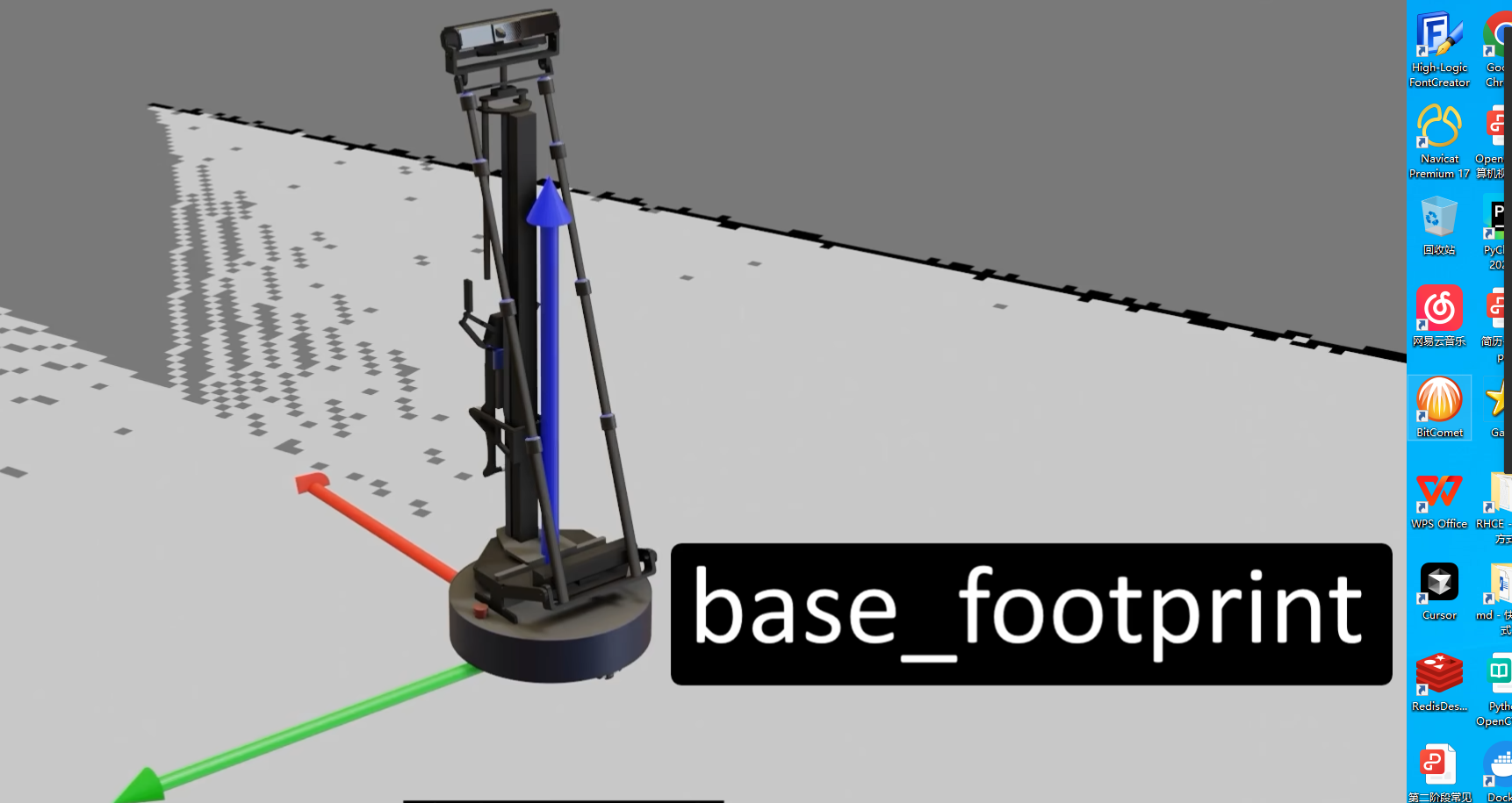
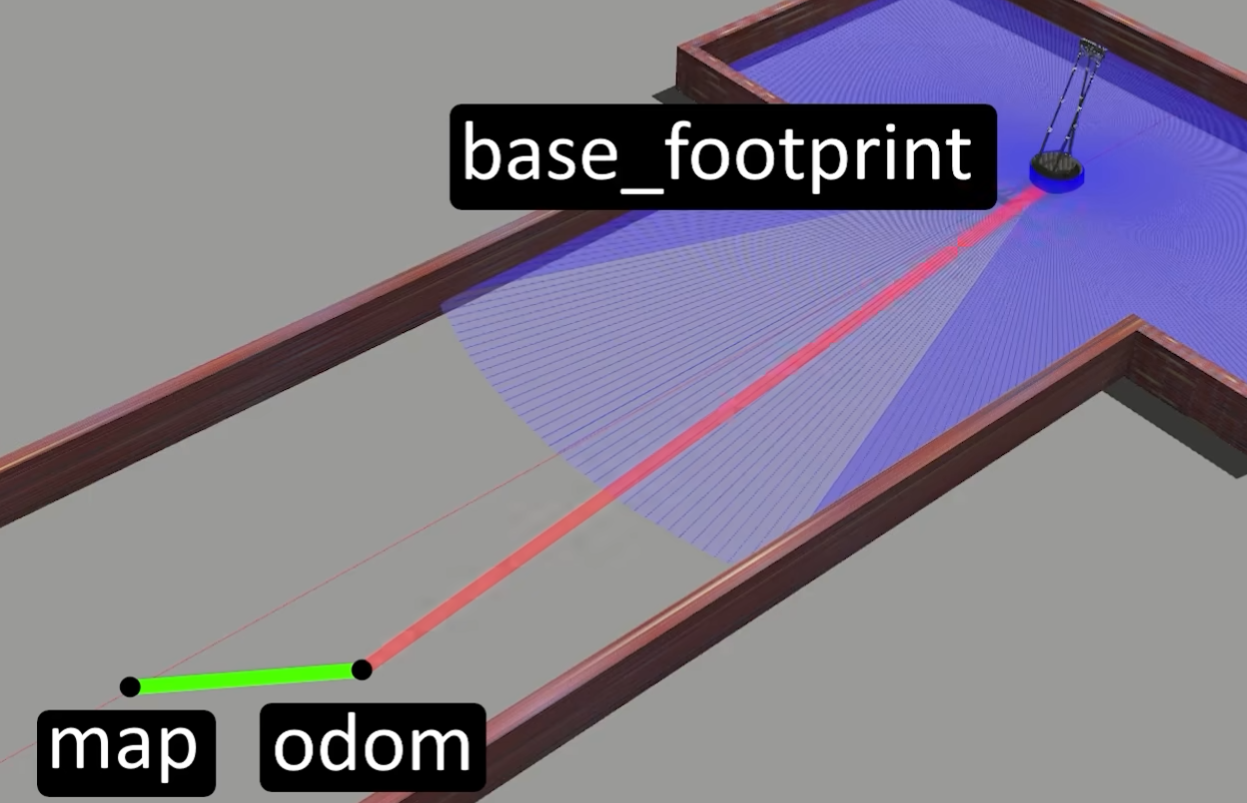
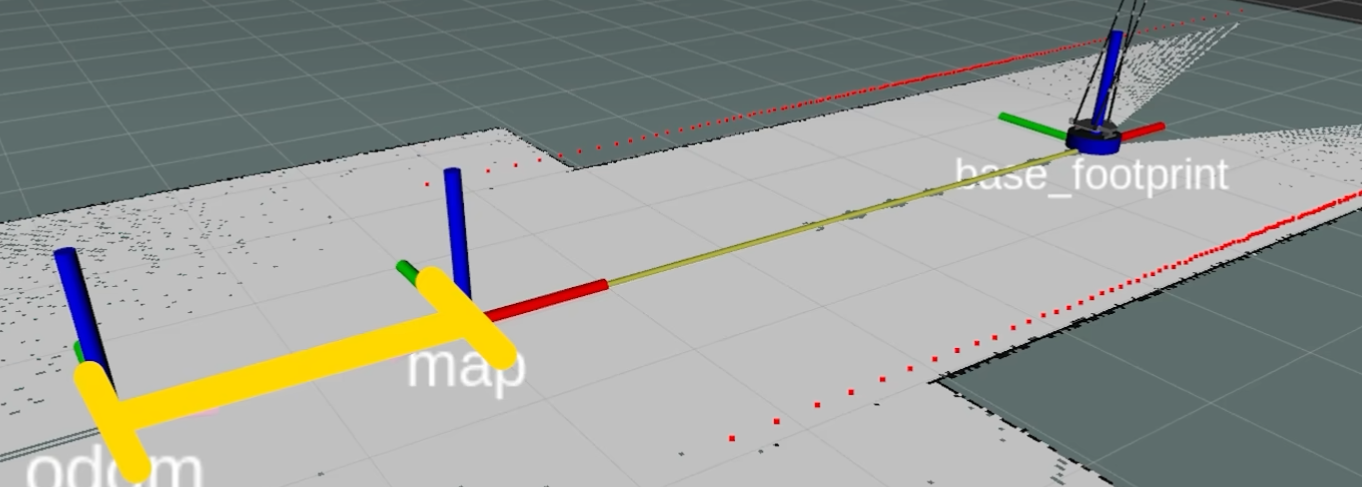
定位
机器人地盘的节点
- `base_footprint·
- 约定俗成的 节点,发布机器人的地盘信息
父子坐标系
- 坐标系起始点为 机器人
初始位置
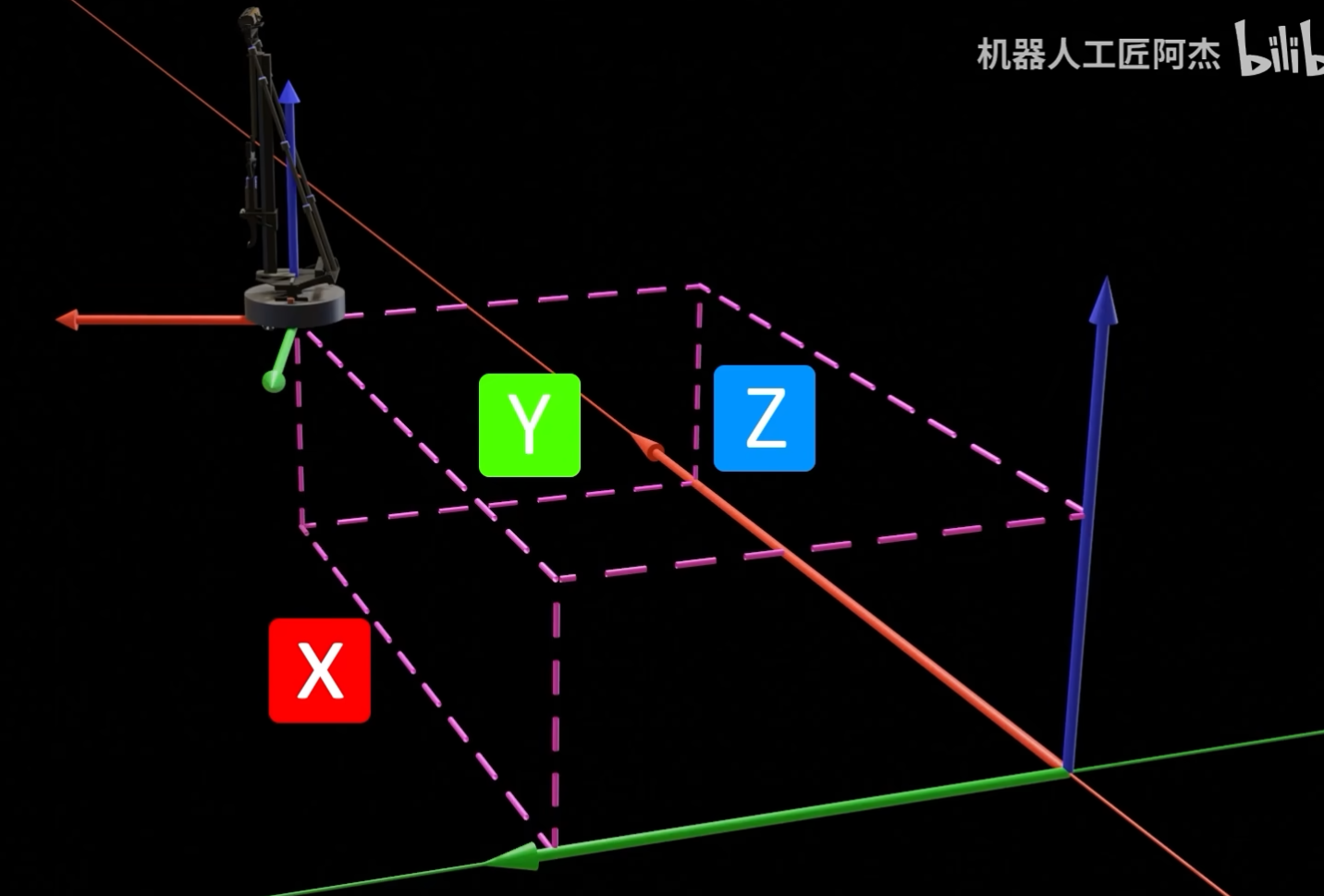
位置描述方式
- 距离
- 角度
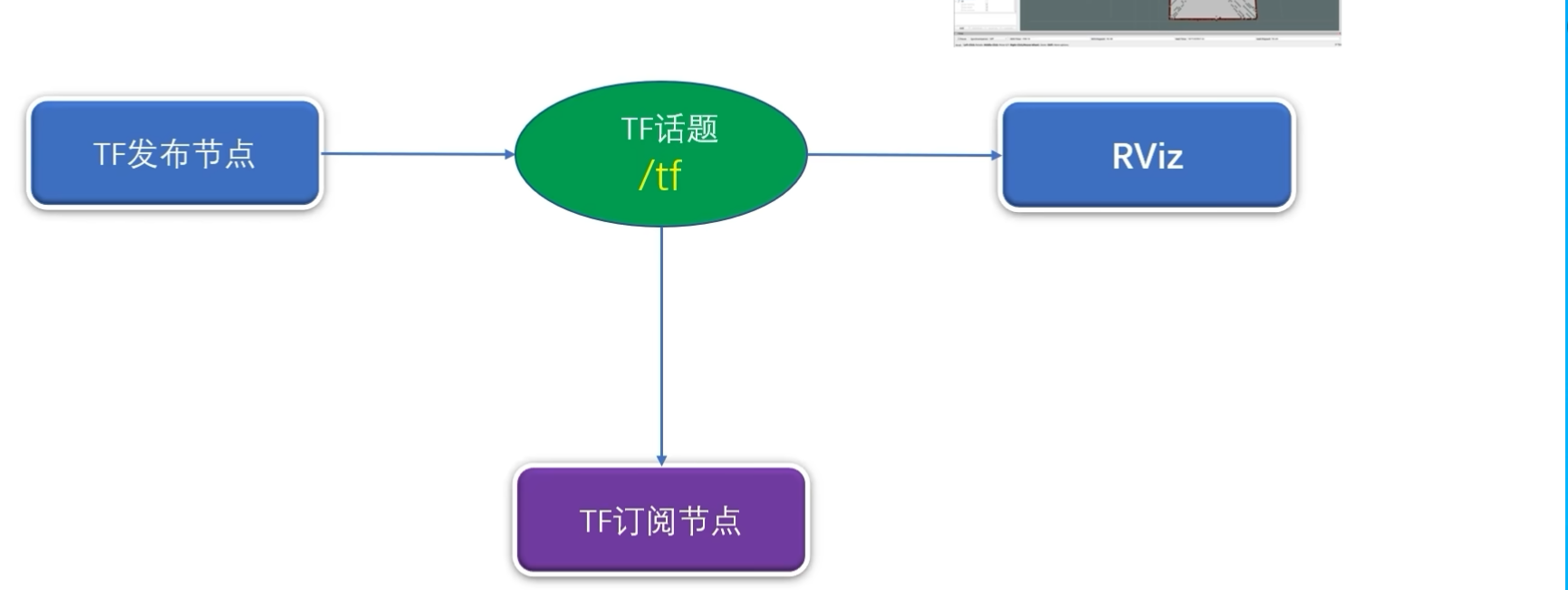
TF [TransForm]
Transform 坐标系变换
TF数据格式


-
Header
- seq
- stamp
- frame_id 父坐标名称
-
child_frame_id 子坐标系名称
-
Transform
-
translation
表示
子坐标系相对于父坐标系的坐标距离偏差量- x
- y
- z
-
rotation 四元数据格式 ---->
表示
子坐标系相对于父坐标系的角度偏差值- x
- y
- z
- w
-
查看 /tf 话题
rostopic echo /tf
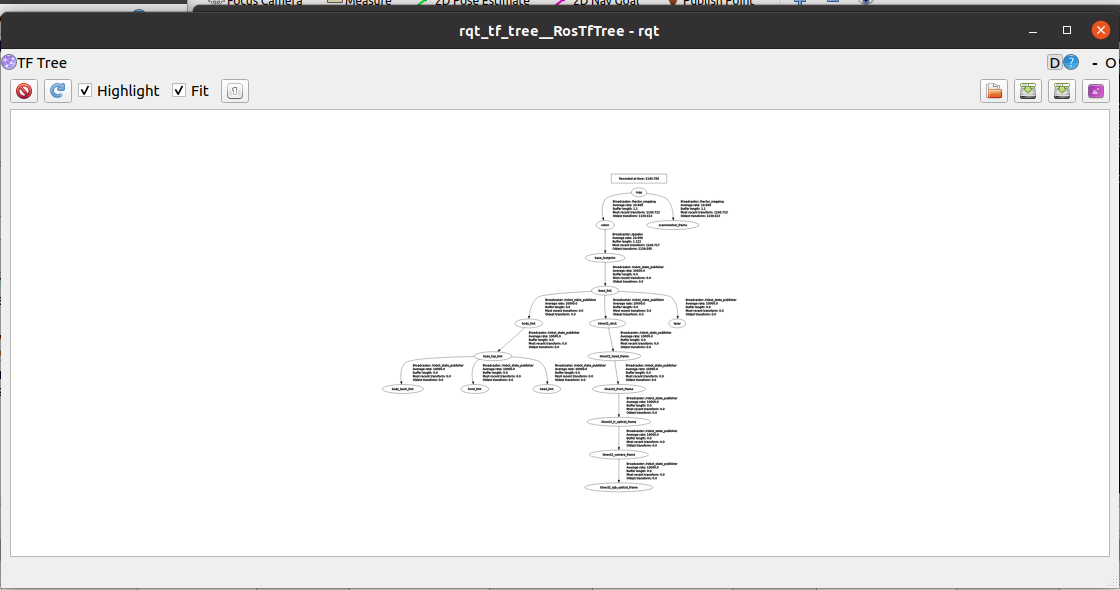
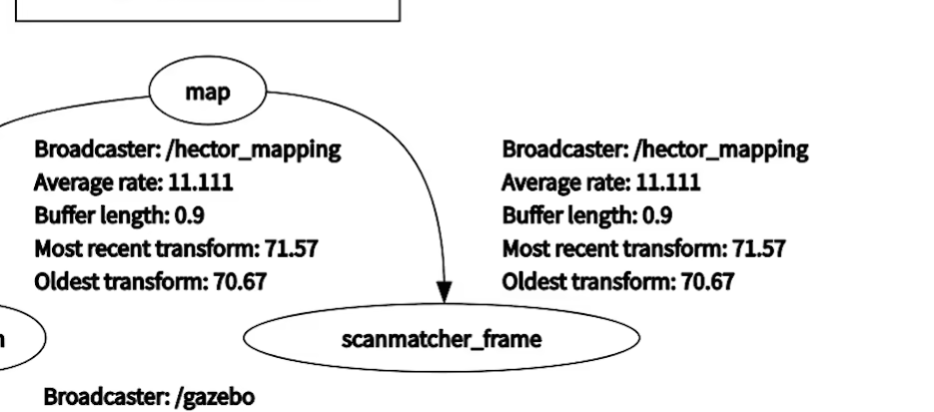
查看各个tf的父子关系
tf tree
rosrun rqt_tf_tree rqt_tf_tree
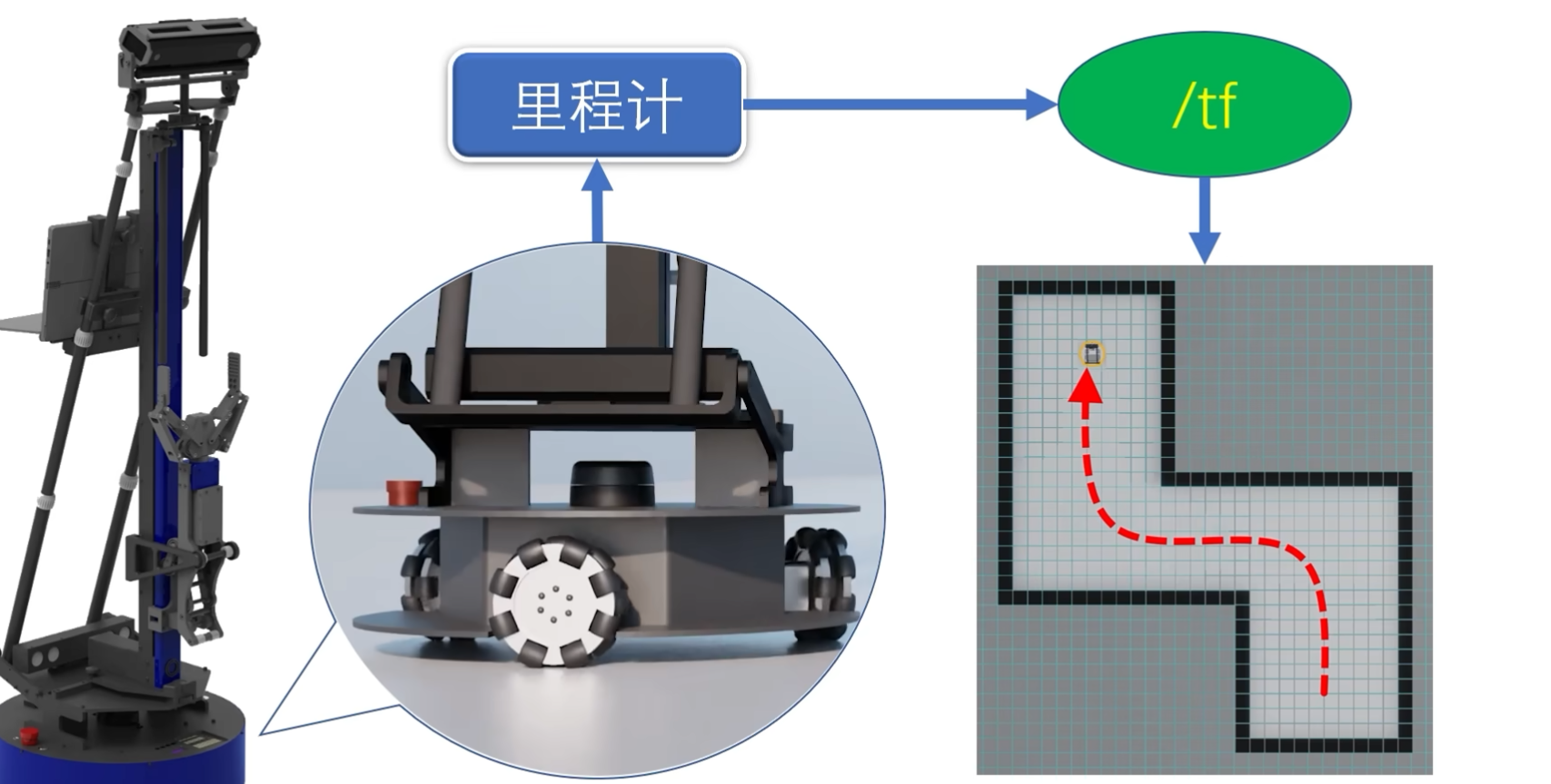
里程计 odom
一种算法
减少单一SLAM 误差问题
开启一个仿真程序
roslaunch wpr_simulation wpb_corridor_hector.launch
这个建图会出现 机器人还在走,但是 rviz 图不更新了
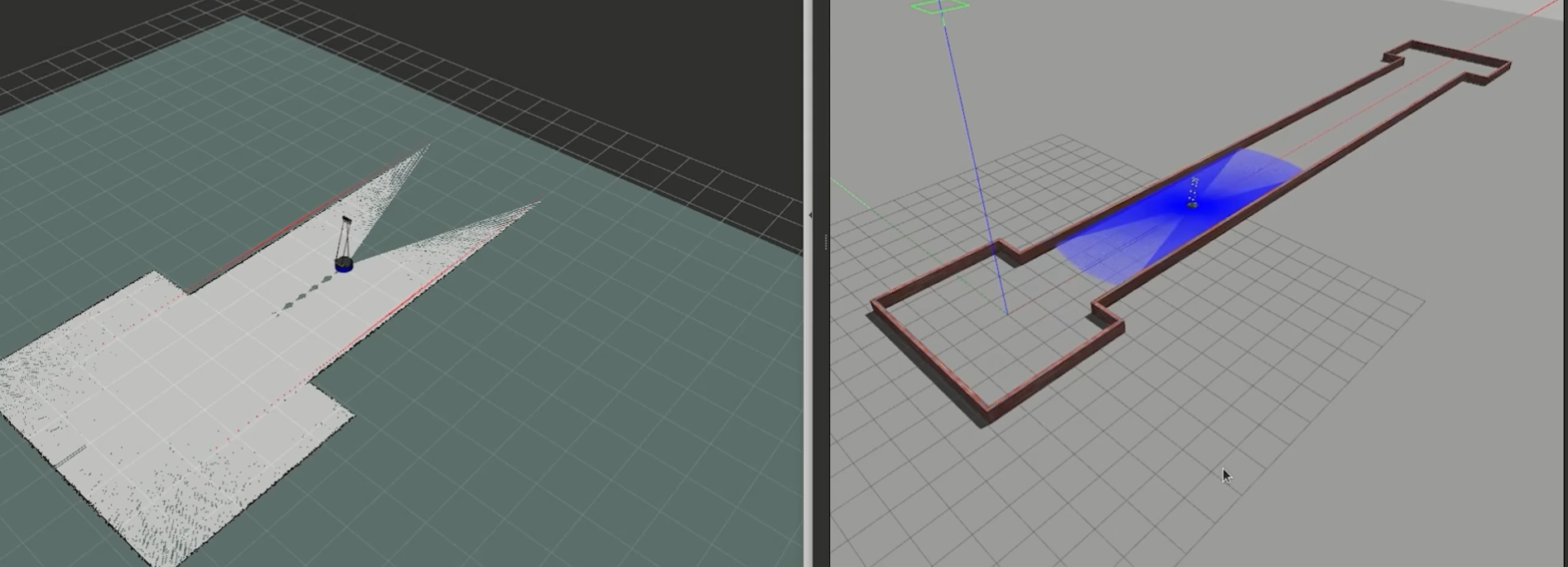
激光雷达每一帧都完全相同,无法估计自己的位移
无法找到自己的区别
Gmapping 算法
- 使用 odom 【里程计】
- 误差使用 odom 来修正
启动仿真环境
roslaunch wpr_simulation wpb_corridor_gmapping.launch
里程计 只是一套软件
理论值和实际值有区别!!!
轮子会打滑!!
障碍物点云配准算法
修正
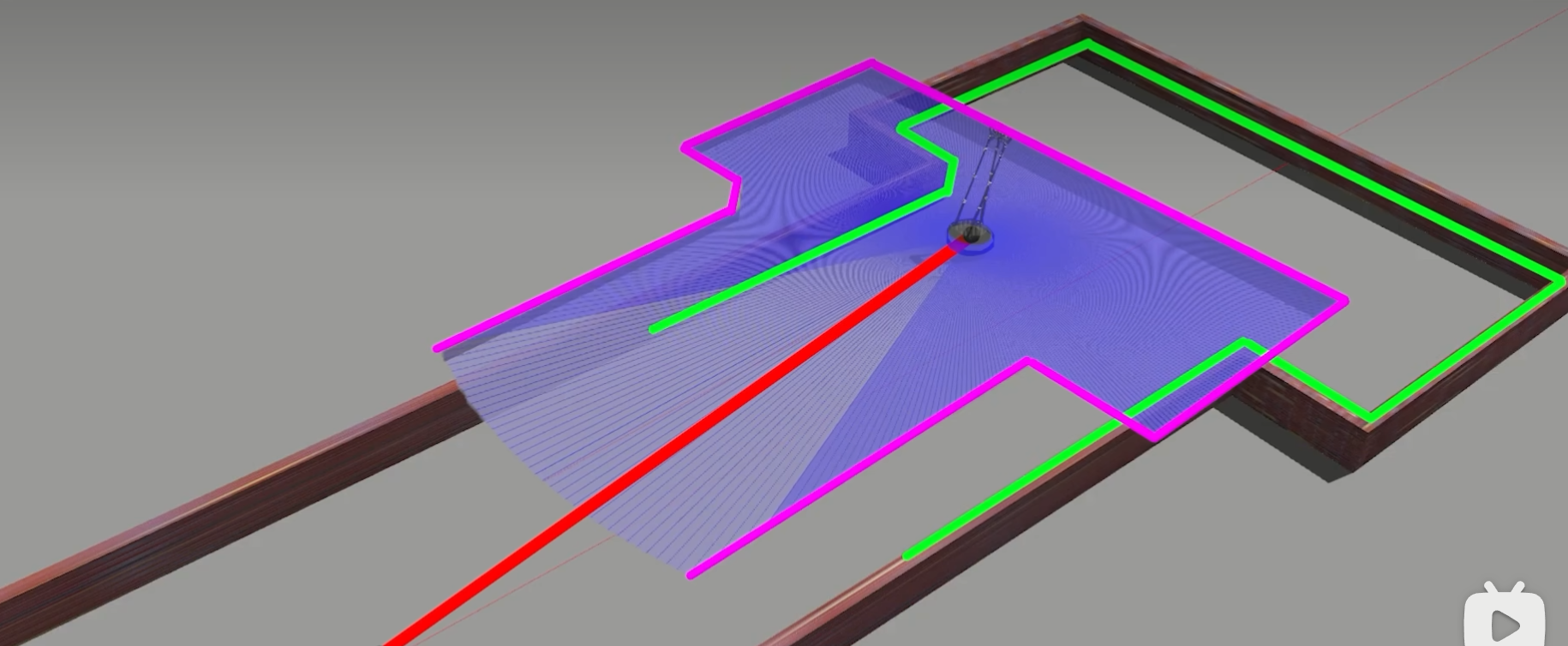
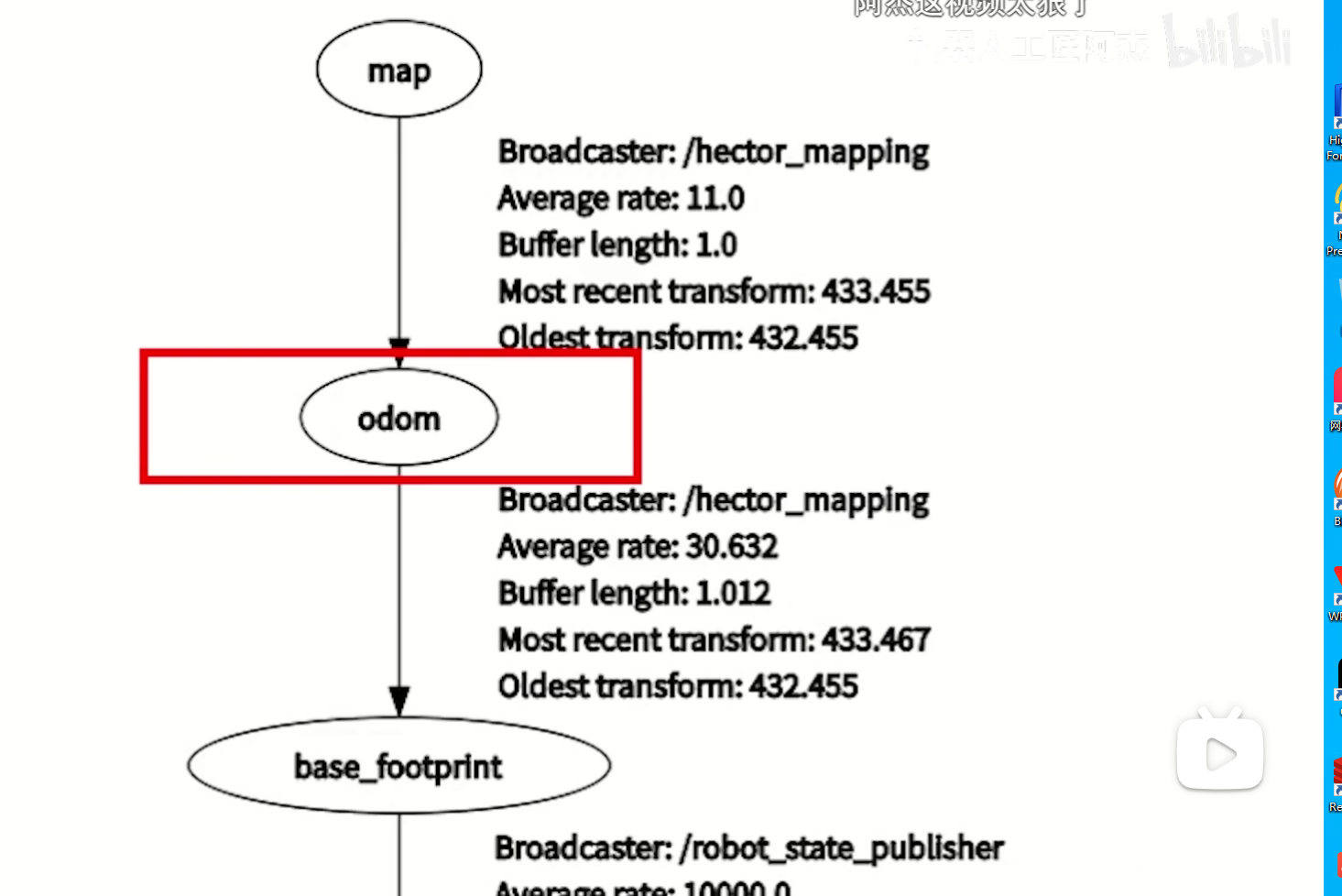
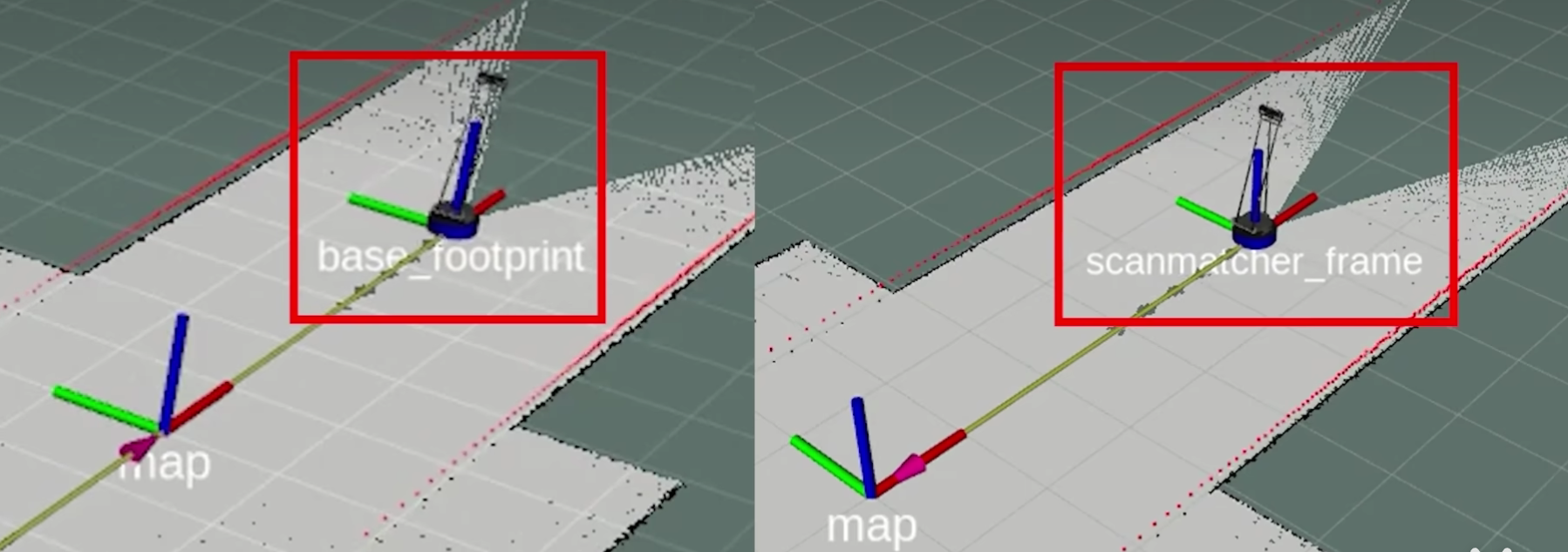
Hector_mapping 算法
- 不考虑里程计的数据
- odom是假里程计
- 为了符合rviz,勉为其难得加了个odom得 tf 节点
odom 在 Hector_mapping 算法下会不断往后增长
为了抵消 scanmatcher_frame 的坐标
只考虑了 RViz中显示的情况
如何使用Gampping进行SLAM建图
需求
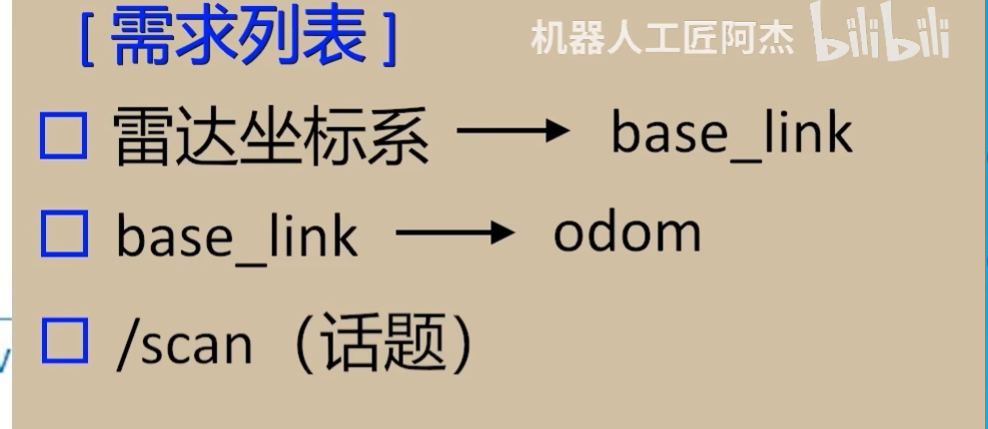
- 雷达坐标系 —> base_link
- base_link —> odom
- /scan (话题)
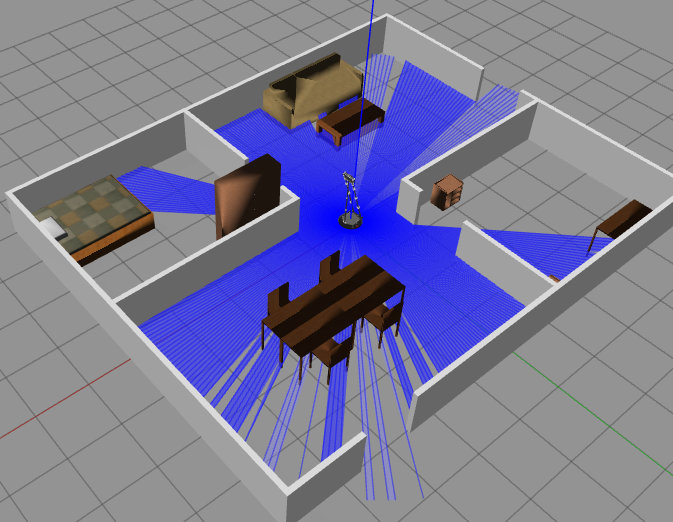
启动仿真环境
roslaunch wpr_simulation wpb_stage_robocup.launch
这样的场景
查看依赖
终端输入
- 查看消息话题
rostopic list
- 查看tf 树
rosrun rqt_tf_tree rqt_tf_tree
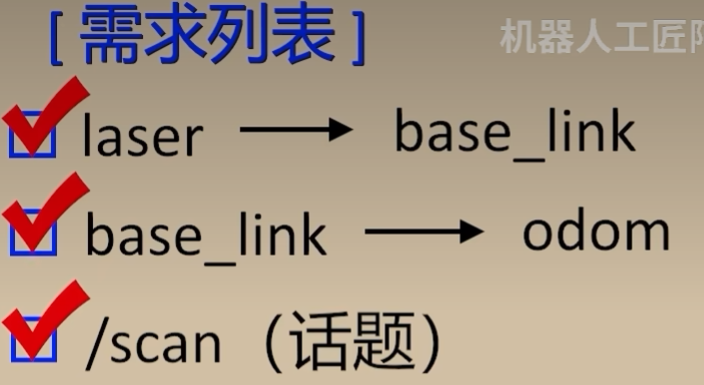
都符合需求
启动Gampping节点
rosrun gmapping slam_gmapping
启动 rviz
运行键盘控制机器人节点
rosrun wpr_simulation keyboard_vel_ctrl
编写launch文件一键启动Gampping建图
创建文件 slam_pkg
catkin_create_pkg slam_pkg roscpp rospy std_msgs
参数设置


栅格 默认 0.05m
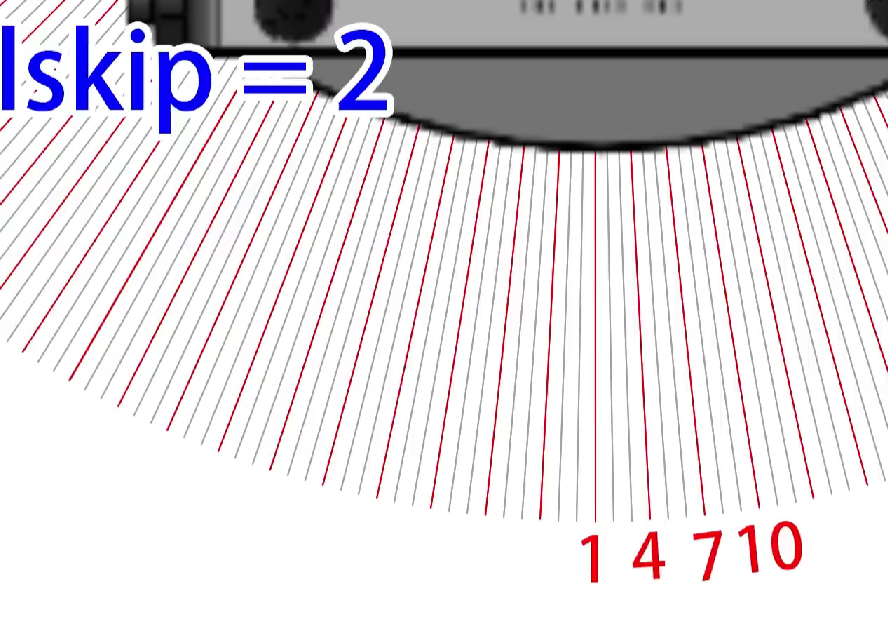
- lskip 跳线
每隔多少个采纳一条射线----> 降低算力消耗
- throttle_scans = 1
- 选择第几帧处理,剩下全部抛弃,转几圈处理一次
gampping.launch 内容
<launch>
<!-- 载入机器人 和 SLAM 的仿真场景 -->
<!-- 实体机器人就启动实体的启动程序 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch" />
<!-- Gamppping SLAM -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" />
<!-- 运动控制 -->
<node pkg="wpr_simulation" type="keyboard_vel_ctrl" name="keyboard_vel_ctrl" launch-prefix="gnome-terminal -e">
<param name="maxUrange" value="3.0"/>
<param name="map_update_interval" value="0.5"/>
<param name="linearUpdate" value="0.1"/>
</node>
<!-- Rviz 显示 -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz" />
</launch>
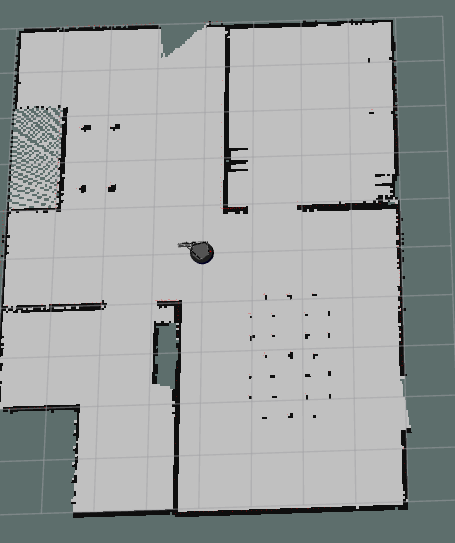
如何保存建立好的地图
map_server
将节点保存到地图里
rosrun map_server map_server -f 【文件名称】
地图文件就长这样

- map.pgm
- map.yaml
- 解释文件
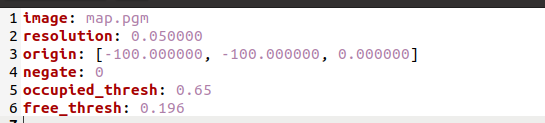
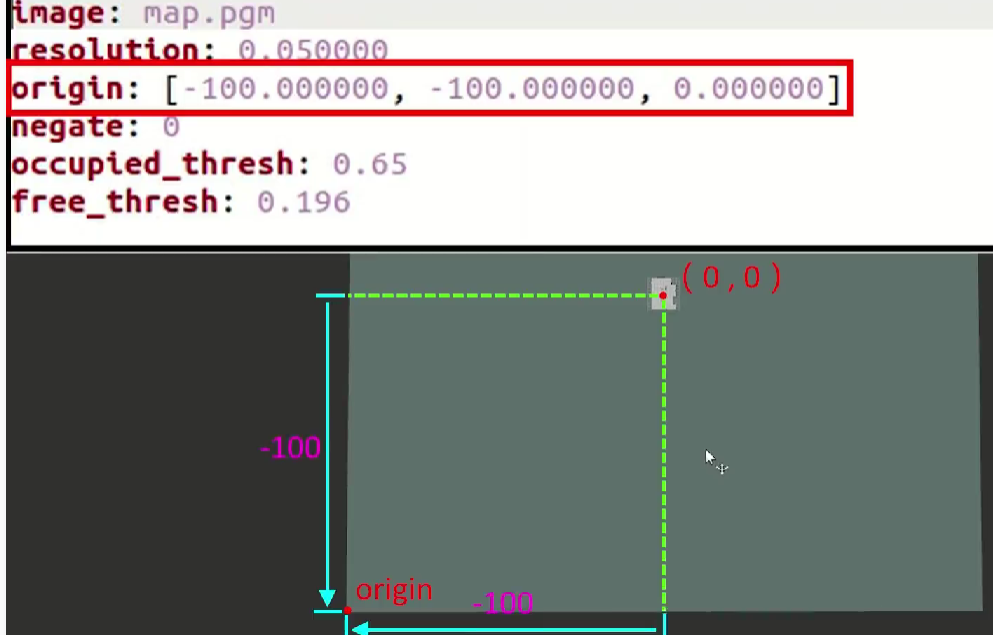
origin相对于 map初始位置的 偏移- [-100.000000,-100.000000,0.000000] x,y,偏移角
加载地图
在终端上运行,map.yaml 文件里
rosrun map_server map_server map.yaml
直接载入成功